Explanation of the process data
Standard digital output (default)
The outputs can be written directly with this standard PDO assignment, i.e. the connected actuators can be switched frame-triggered directly.
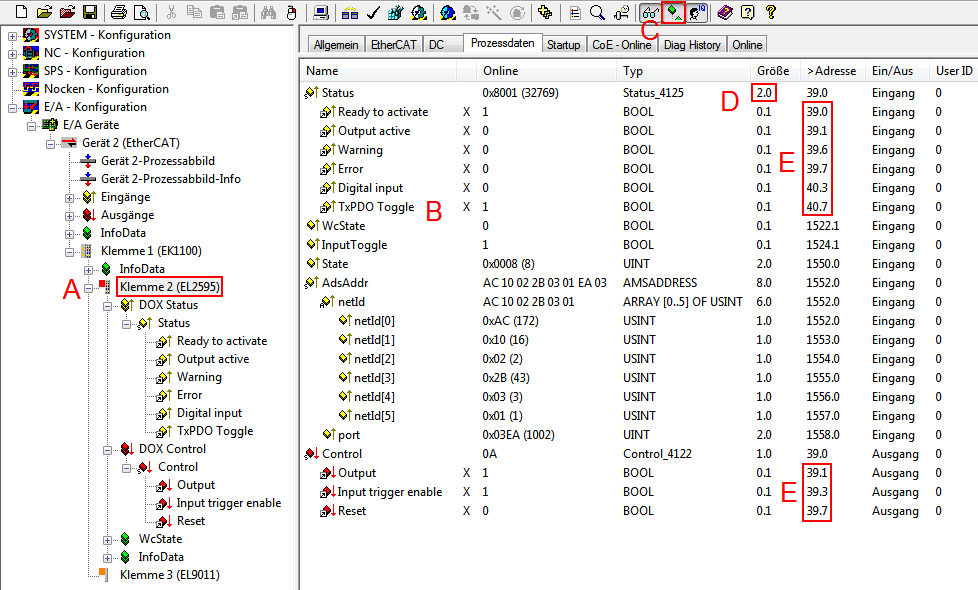 Fig.144: Standard EL2595 process image
Fig.144: Standard EL2595 process imageThe EL2595 (A) has 2-byte variables at its disposal with different bit meanings. These can be seen by expanding the tree (A). They are also displayed in the detail view (B) if the appropriate display function (C) is activated.
The bit meaning i.e. offset position can then also be taken from the memory assignment display (E), taking into account the variable size (D).
Both the collective name e.g. Status and the individual bit variable e.g. "Output active" can be linked, but not both at the same time.
Input data | |||
|---|---|---|---|
Collective name | Name | Description / function | Bit position [0..15] |
Status | Ready to activate | The terminal signals its readiness for operation here. | 0 |
| Output active | The output is actively switched. | 1 |
| Warning | A warning has occurred - > evaluate “Diag data” (index 0xA000). | 6 |
| Error | An error has occurred and the output driver is deactivated - > evaluate "Diag data" (index 0xA000). | 7 |
| Digital input | The status of the digital input is returned here. | 11 |
| TxPDO Toggle | Changes its state each time process data are exchanged. | 15 |
WcState |
| Setpoint during operation: 0 Each datagram of the EL2595 indicates its processing state here. This allows the EL2595 to be monitored for correct process data communication. |
|
InfoData (State) |
| Setpoint during operation: 8 Status display of the “EtherCAT state machine” |
|
AdsAddr |
| AMS address of the responsible EtherCAT Master in the format "0.0.0.0.0.0". In addition, the port number valid for this Slave. Required for acyclic accesses to the CoE at runtime. |
|
Output data | |||
|---|---|---|---|
Collective name | Name | Description / function | Bit position [0..15] |
Control | Output | Switches the output active | 1 |
| Input trigger enable | "Arms" the digital input as a trigger input | 3 |
| Reset | Resets an error | 7 |
Standard digital output with InfoData
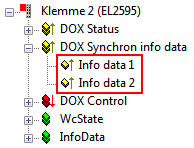 Fig.145: Additional information data
Fig.145: Additional information dataTwo further cyclic data words can be displayed per channel for more exact information about the states of the actuators or the driver stage. The respective selection is to be configured via the corresponding Index 0x8002:11 or 0x8002:19 in the CoE. Among other things, the interior temperature of the terminal or the momentary current through the connected actuator can be selected, for example.
Input data | |
|---|---|
Name | Description / function |
Info data 1 | Additional channel information, definition in 0x8002:11 |
Info data 2 | Additional channel information, definition in 0x8002:19 |
External trigger input
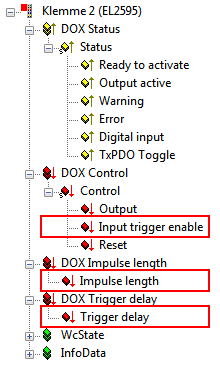 Fig.146: Additional process data in the "External trigger input" mode
Fig.146: Additional process data in the "External trigger input" modeIn addition to the variables of the "Standard digital output" mode, there are also the following variables:
Output data | |
|---|---|
Name | Description / function |
Input trigger enable | "Arms" the digital input as a trigger input |
Impulse length | Specifies the length of the output pulses. The unit is 1 µs. The data type UDINT (double word) provides the user with maximum flexibility and can specify pulses from 1 µs to approx. 1 hr with a high resolution. |
Trigger delay | Specifies the length of the delay from the time of the digital input to the switching of the output. The unit here is similarly 1 µs. |
External trigger input with InfoData
Like both standard data types, additional information data can also be displayed in "External trigger input" mode. See above.
DC Digital output
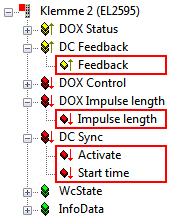 Fig.147: Additional process data for Distributed Clocks mode
Fig.147: Additional process data for Distributed Clocks modeIn Distributed Clocks mode the EL2595 works according to timestamp order. The process image is structured correspondingly, as in the fig. Additional process data for Distributed Clocks mode.
Input data | |
|---|---|
Name | Description / function |
Feedback | The terminal returns the current state of the output channels in this byte. This can be used to check a switching order. |
Output data | |
|---|---|
Name | Description / function |
Activate | This byte activates a new start time in the terminal through the transition 0 --> 3. The sequence:
|
Start time | 64-bit value of the next desired switching event. The data of the DC time:
|
 | Switching time The desired switching time must be far "enough" in the future, as seen from the time of calculation, in the NC/PLC in order to be capable of being conveyed to the terminal, including activation. Since 2 EtherCAT cycles are required for the activation, it is recommended not to make this interval smaller than 3 cycles. |
DC Digital output with InfoData
Like both standard data types, additional information data can also be displayed in DC mode. See above.