CoE data
Configuration of the terminal via the CoE
The terminal must be configured via the CoE before the actuators can be put into operation.
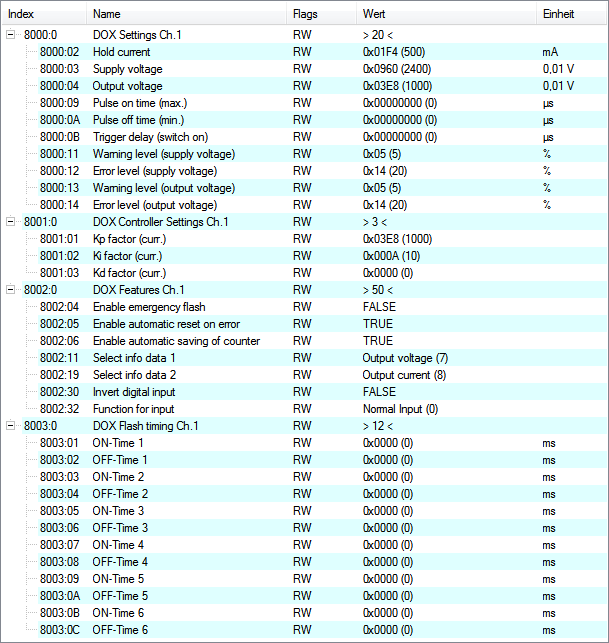 Fig.155: CoE configuration data
Fig.155: CoE configuration dataDOX Settings
For a well-working and fast current controller, the expected "Output voltage" (Index 0x8000:04) must be precisely adjusted. This value is used as the initial value of the control. That means: the better the output voltage is adjusted, the less the current controller has to readjust and the smaller the voltage increase with the first output pulses. This initial value is used whenever the controller switches from INIT to OP, or if the terminal switches from an error state to the normal state.
The driver stage has the possibility to operate in Buck or Boost mode. Buck mode is active if the "Output voltage" is smaller than the "Supply voltage". In the other case the Boost mode is used. There is a hysteresis area between these operation modes. This means that the controller does not switch to the other operation mode within the range of approx. +/- 1 V around the supply voltage. This prevents pulsing of the output voltage.
The consequence of this is that the operating point of the connected load must be observed when designing the supply voltage. The user must specify which nominal voltage of the load is required at the desired operating current – "Hold current".
Example: Hold current = 500 mA, output voltage = 27 V -> the supply voltage may not lie within the range of 26 V to 28 V
"Pulse on time" and "Pulse off time" are intended for the protection of the connected load. Here, on the one hand, "Pulse on time" sets the maximum time of the output pulse for which the load may be operated with the specified "Hold current" without being destroyed. On the other, "Pulse off time" configures the minimum switch-off time for adjusting an average power loss in overload mode so that the load is not thermally destroyed.
The delay time of the digital input is parameterized with "Trigger delay".
The "Warning level" and "Error level" offer the possibility to monitor the supply voltage and output voltage. The thresholds set here are proportionally subtracted from or added to the configured values.
Example: output voltage = 10 V, warning level = +/- 5%, error level = +/- 20% -> warning at Uo < 9.5 V, Uo > 10.5 V; error at Uo < 8 V, Uo > 12 V
 | Setting of the threshold values when commissioning If the output is frequently deactivated during start-up due to an overvoltage or undervoltage error, the cause may be the incorrect configuration of the output voltage. In this case the error threshold can be set a little higher and the compensated voltage in Index 0x9000:08 can be read out and Index 0x8000:04 adapted if necessary. |
DOX Controller Settings
The current controller is configured with this object.
| Control factors The control factors (Kp, Ki, Kd: Index 0x8001:01; 0x8001:02; 0x8001:03) should not normally be changed, since the default setting is adequate for most applications. |
DOX Features
"Enable emergency flash" activates the output of a signal sequence in the case that the watchdog (loss of communication) of the terminal is triggered. The times are parameterized with the "DOX Flash timing" object.
If an error occurs it is not absolutely necessary to manually acknowledge it with the "Reset" bit in the PDO input data. By the activation of "Enable automatic reset on error" an existing error is automatically cleared on resetting "Output".
| Automatic clearing of the error Before resetting "Output" a diagnosis must take place and the indices 0x9000, 0xA000 and/or 0xF900 must be read out. The information is no longer available after the output has been reset! |
If "Enable automatic saving of counter" is activated, the objects "Operating hour counter" and "Switching operation counter" are backed up to the internal memory at intervals of 15 minutes. However, this feature can also be deactivated and carried out manually at a defined time with the command object (Index 0xFB00).
The selection of the values represented in the PDO "DOX InfoData" is carried out with "Select info data n".
An inversion of the digital input is possible with "Invert digital input".
Different functions of the digital input can be configured via "Function for input". The following selections are possible:
- Normal input (0dec)
-> normal digital input without additional functions (the status is shown in the corresponding PDO) - Hardware enable (1dec)
-> in addition to the " Enable emergency flash" bit, the input is used as an additional static hardware enable, i.e. the digital input must be active so that the emergency flash is switched - Trigger input (2dec)
-> in addition to the "Output" bit, the input is used as an additional trigger input, i.e. the output is switched on a rising edge on the input (in the watchdog case the input trigger has no function) - Trigger input (Watchdog disabled) (3dec)
-> same function as before but with the difference that the trigger input is still functional with the watchdog activated
DOX Flash timing
With Emergency flash activated the times of the signal sequence are specified here. With a resolution of 1 ms the user can define a total of 6 pulse outputs. If all 6 pulses are not required, the no longer used "ON-Time n" must be written to 0. If the desired pulse sequence has been processed, the terminal starts again at ON-Time 1.
Terminal diagnostics
The terminal offers the user various values in the CoE for diagnostics.
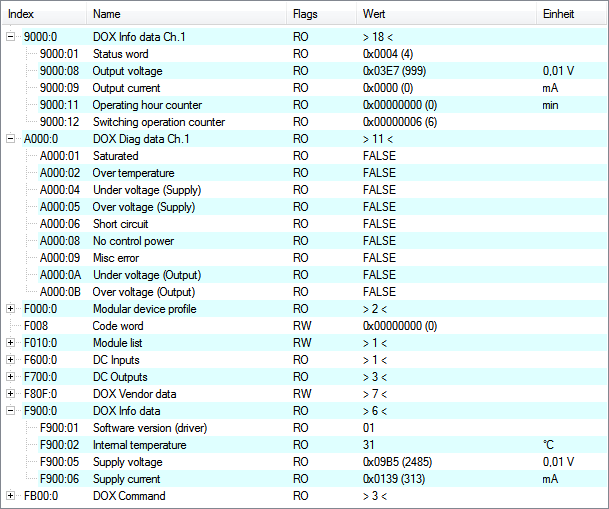 Fig.156: CoE - diagnostic data
Fig.156: CoE - diagnostic dataDOX Info data, DOX Diag data
Index 0x9000 offers various channel-related measured values, such as output voltage or current. If a warning or error occurs, the user can obtain precise information about the cause of the fault from Index 0xA000.
Terminal-specific information can be found in Index 0xF900.
All 0x9000-series and 0xF900-series objects can be displayed in the process image via the "Synchron info data" and are to be configured via index 0x8002:11 or 0x8002:19 respectively.
Meaning of the bits in "Diag data":
- Saturated: current controller output of 100% duty cycle
- Over temperature: the internal temperature of the terminal is higher than 80 °C (this value is configurable); if it exceeds 100 °C then Misc error is also set and the driver stage is deactivated.
- Under voltage (Supply): the measured supply voltage is x% lower than the configured supply voltage (see index 0x8000:03 and Index 0x8000:11 or Index 0x8000:12 respectively)
- Over voltage (Supply): the measured supply voltage is x% higher than the configured supply voltage
- Short circuit: Short circuit / overcurrent in the driver stage
- No control power: no control voltage / supply voltage applied
- Misc error: general error display
- Under voltage (Output): the measured output voltage is x% lower than the configured output voltage (see Index 0x8000:04 and Index 0x8000:13 or Index 0x8000:14 respectively)
- Over voltage (Output): the measured output voltage is x% higher than the configured output voltage
Command interface
The terminal offers the user a command interface for different services.
 Fig.157: CoE command object
Fig.157: CoE command objectDOX Command
In addition to the general commands described here, there are three more specific commands for the EL2595 that are designed to aid the user with the operation of the terminal.
0x0001 (manual saving of the operating hour and switching cycle counter):
The two counters in Index 0x9000:11 and Index 0x9000:12 are saved acyclically with this command.
0x0002 (manual deletion of the operating hour and switching cycle counter):
The two counters in Index 0x9000:11 and Index 0x9000:12 are deleted with this command.
0x0103 (calibration of the CoE value of the output voltage):
In order to ensure optimum switching characteristics of the load, the configured output voltage should lie as close as possible to the real output voltage. Therefore the measured value from Index 0x9000:08 should be transferred into the object Index 0x8000:04 during commissioning. If the user issues this command to the terminal, the terminal carries out this process automatically.
| Order of the data in the Command object The data in the Request and in the Response subindex are created as byte arrays. For the user this means that he must first carry out a byte swap with the commands/requests that he writes. |