Travel distance control
The travel distance control function can be activated in the CoE. Starting from the current counter value, a target counter value is automatically approached via ramps, taking into account a maximum driving frequency, and the corresponding pulses are output at the outputs. The output frequency thereby changes in accordance with the current counter value.
When the preset counter value is reached, the terminal switches the frequency to zero. The output of an exact number of pulses is only possible with this "travel distance control" function.
The sequence is determined by several factors, see figure. Before parameterizing the travel distance control, it is recommended to carry out a CoE reset "Restoring the delivery state" in order to rule out side effects.
The sequence and the associated parameters are listed in following table; in enhanced operation mode some parameters are no longer in the CoE, but can be linked as process data.
Phase | Normal operation mode | Enhanced operation mode |
|---|---|---|
Parameterization | ||
Activate travel distance control | 0x8000:0A = TRUE | 0x8010:0A = TRUE |
Basic ramp frequency (10 Hz / 1 kHz) | 0x8000:07 = ? | 0x8010:07 = ? |
Ramp time constant "rising" t1 [Δ/sec] | 0x8001:04 = ? | 0x8010:14 = ? |
Maximum driving frequency f1 | 0x8800:02 = ? | --- |
Ramp time constant "falling" t3 [Δ/sec] (> 1.1 * ramp time constant “rising” t1 see note!) | 0x8001:05 = ? | 0x8010:15 = ? |
Output frequency f2 | 0x8001:07 = ? | 0x8010:17 = ? |
Trip | ||
Specify target position | 0x8800:01 = ? | PDO: TargetCounterValue = ? |
Trip start | CW.2 = TRUE | PDO: Control.GoCounter = TRUE |
Maximum driving frequency f1 | --- | PDO: FrequencyValue <> 0 |
Reset | ||
| CW.2 = FALSE | PDO: FrequencyValue = 0 |
|
| PDO: Control.GoCounter = FALSE |
 | Setting of “Go counter” in enhanced operation mode In the case of travel distance control in enhanced operation mode, the "Go counter" bit must be set at the same time or before specifying the "Frequency value". If the "Go counter" bit is not set and the "Frequency value" is not equal to 0, then travel distance control is not active and clock pulses are already output! |
| Ramp time constant The "real" ramp time results from the multiplication of the basic ramp frequency with that of the rising/falling ramp time constant. |
| Steepness of the falling ramp In order to travel to a destination with precision, it is necessary that the time constant for the falling ramp is greater than that of the rising ramp by a certain factor. This is necessary so that the slowing down frequency is reached before the final counter state, so that the terminal does not drive up to the end point at full speed. To explain in more detail: |
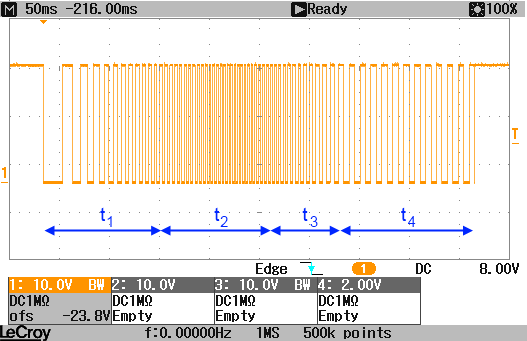
Example of a travel distance ramp
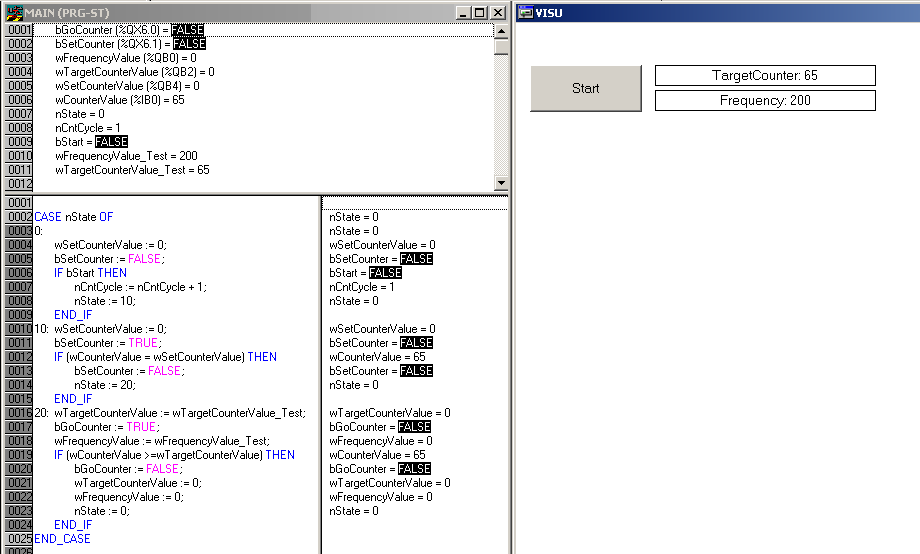
By way of example, the recording of a short real travel distance ramp is shown here together with the sample program used for it:  download
download
The short step sequence resets the current counter value to 0 and then drives to the target position 65. In the System Manager file the EL2521-xxxx is set to the appropriate CoE values for this example via the StartUp parameters.
The result is the output of a variable frequency up to the target position 65.