Adjust DistributedClocks if necessary
The EL1262-0010 controls the input and output operation (reading or writing the PDO) via a single internal trigger, the ESC Sync0, so they cannot be controlled independently in terms of time. The ShiftTime setting (both via the EtherCAT master and via the slave's own dialog) always affects the entire terminal (input and output).
Note for the EtherCAT master DC-ShiftTime dialog:
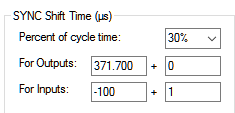 Fig.201: Example values DC-ShiftTime dialog
Fig.201: Example values DC-ShiftTime dialog The EL1252-0010 is configured as a "DC Output Device" via ESI, "For Outputs" must be used if necessary.
The time shift of the input/output process of the EL1262-0010 by DcShiftTime is of practical importance in 2 cases:
- The temporal cooperation "simultaneity" of the EL1262-0010 with other DC devices is to be changed (in relative terms, i.e. output/read earlier or later)
- there are data transmission losses (recognizable e.g. in jumps <> + 1 in the CycleCounter) because the time of passage of the EtherCAT frame in the EL1262-0010 overlaps with the PDO data transfer in the ESC
For this reason, it is necessary to proceed as follows:
1. The terminal is only operated with inputs
- Change DcShiftTime
- for all devices in the EtherCAT segment (rather unusual):
Enter the desired value for "For Outputs" in the EtherCAT master dialog: - - For the individual terminal:
Fig.201: Change SYNC shift time"User Defined ShiftTime" for SYNC0 in [µs] with (decimal values possible) change as required -> this has a direct effect on the read time, i.e. the start of sample = and thus the value in PDO StartTimeNextLatch-
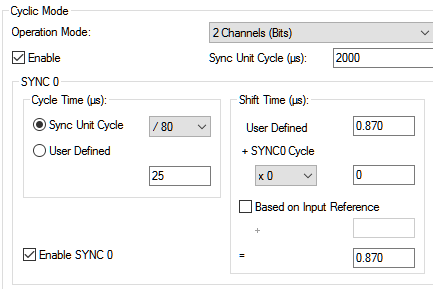 Fig.203: Change User Defined Shift time
Fig.203: Change User Defined Shift time- If external delays are to be compensated, C0E x80n0:02 "Timestamp correction" can also be written in [ns], in which case the value in PDO StartTimeNextLatch is offset (added or subtracted) against this entry in each cycle . The electrical read time does not change, only the transmitted timestamp is manipulated.
2. The terminal is only operated with outputs
- Change DcShiftTime
- For all devices in the EtherCAT segment (rather unusual): see for inputs
- For the individual terminal: see for inputs - Separate manipulation of the output time is not possible
3. The terminal is operated with inputs and outputs
First set the output as above, then set the input timestamp using "Timestamp correction".
 | Transfer of the DC timestamp The transmission of the DC timestamp StartTimeNextLatch/StartTimeNextOuput offers the possibility of processing the process data on a "real" time basis rather than a cycle basis. This requires additional code on the controller side, which has already been created by Beckhoff in the case of the TwinCAT 3 XFC library or NC/cam controller and must otherwise be created on the application side. |