Commissioning with a 32-bit controller
 | The "Tc3_DriveMotionControl" library cannot be used. You can only execute travel commands by going through the state machine manually. See chapter State machine. |
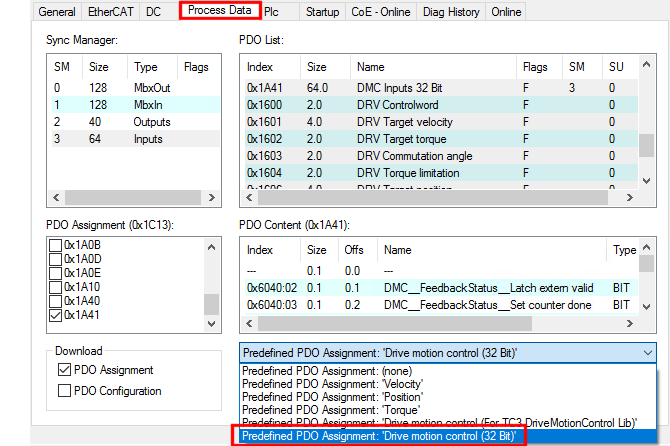
Since in the factory setting the module provides 64-bit process data, but this cannot be processed by some controllers, there is also the alternative option of mapping the process image with 32 bits. This can be set via the Predefined PDO Assignment "Drive motion control (32-bit)".
(To map the inputs and outputs manually, use the 0x1641 and 0x1A41 indices. See chapter Process data).
All position related process data are 32-bit instead of 64-bit with this Predefined PDO Assignment. The 32 bits are divided into 20-bit single-turn and 12-bit multi-turn revolutions, independent of the resolution of the feedback.
The EtherCAT plug-in module still calculates internally with 64-bit data. Therefore e.g. 0x8040:08 "Calibration position" must still be specified in 32-bit single-turn and 32-bit multi-turn instead of 20-bit single-turn and 12-bit multi-turn.
It should be noted that the EJ7411 plug-in module only supports incremental encoders and not absolute encoders. Therefore, the position data is not retained beyond a power cycle.
All non-position related process data remain unchanged in size. The address offsets of the individual process data are identical and padding bytes are inserted at the corresponding positions.
The speed related process data is scaled in 10,000ths of the parameter 0x8011:1B "Motor speed limitation".
The process data for acceleration and deceleration specify in ms how fast the motor should accelerate to the speed specified in 0x8011:1B "Motor speed limitation" or decelerate from speed to standstill. With a value of 2000 for the acceleration, the motor would need 2 s to reach the speed.
Configuration
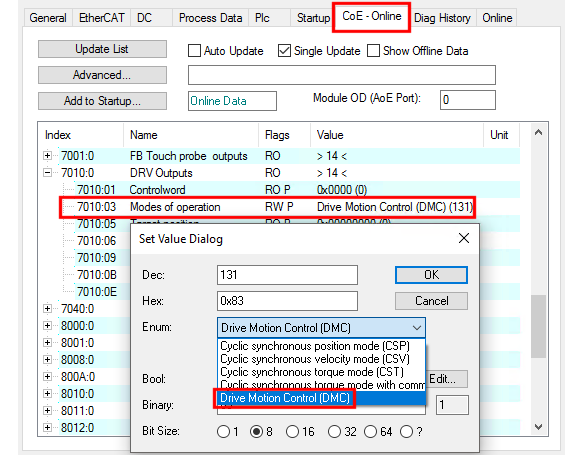
- 1. In the CoE parameter 0x7010:03 "Modes of operation" set the operation mode "Drive Motion Control (DMC)".
- 2. Activate the Predefined PDO Assignment "Drive motion control (32-bit)".
- The process data for using Drive Motion Control is activated.
CoE parameters
The CoE parameters for configuring Drive Motion Control are located in the following CoE objects: