Execution of a test run
Step 1: preparation
- 1. Enable configuration.
- 2. Click on the axis and select the "Online" tab.
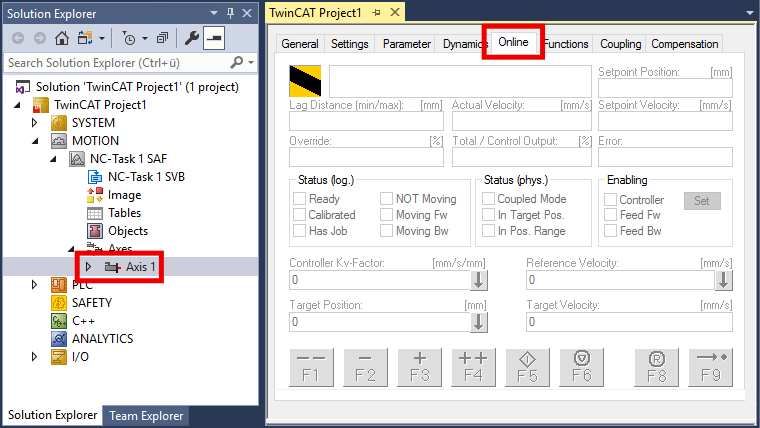
- 3. Move the motor shaft by hand to check the configuration of the encoder.
Does a relative movement of 360° actually correspond to a full revolution of the motor shaft? - For example, a common cause of error is the scaling factor. Check the settings of the scaling factor (see chapter Configuration of TwinCAT NC, section "Scaling factor").
Step 2: Performing a test run
| |
The motor may behave differently than expected Injuries and damage to property are possible.
|

- 1. Release the controller: click on "Set" and in the window that appears click on "All".

- A frequent cause of error is, for example, that 24 V is not present at the "HW Enable" input. See note Enabling the output stage.
- Other error causes are possible and are displayed in the status messages of the Diag-History.
- 2. Try different commands.
- 3. Check whether the motor follows the commands in a stable and reliable manner.
Step 3: checking the result
Check the following points, for example:
- Were errors reported in the Diag History? See chapter Diag History.
- Is the motor turning in the expected direction?
- Does the speed match the preset?