Description
When collision monitoring is used, the position setpoints of a pair of axes generated in the CNC are monitored. If the distance between the two positions falls below the minimum permitted distance, taking into consideration the deceleration distance needed to stop, the axes are stopped immediately in accordance with the specified dynamic data and the CNC issues the message 70092.
After CNC-RESET, the two axes must be positioned away from one another.
Two axes for which collision monitoring is done are called collision pair.
It is possible to define multiple collision pairs, also it is possible to monitor the distance of one axis against two other axes.
| |
If the axes are shut down due to detection of a collision, they will generally leave the programmed contour. |

Parameters
To set up the collision check for one axis (the master axis) in parameter P-AXIS-00043 (coll_check_ax_nr) the logical axis number of the other axis (the collision partner) must be declared.
To enable an axis for collision monitoring, bit 0x8000 in the P-AXIS-00015 (achs_mode) parameter must be set.
The minimum permitted distance between the reference points of the slides is specified via the P-AXIS-00045 (coll_offset) parameter of the master axis. If two collision pairs with the same axes are declared and the minimum permitted distance are different for the axes, the higher of the two values always applies.
If the collision axes are in different CNC channels, by means of the P-AXIS-00044 (coll_decelerate_chan) parameter, you can compel stopping in both channels if a collision axis should report a driver error.
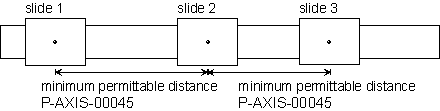 Fig.3: Minimum permitted distance
Fig.3: Minimum permitted distanceExample
In this example two collision pairs are defined:
- First pair: Axis 1 with axis 2, where axis 2 is the master axis and axis 1 is the collision partner.
- Second pair: Axis 2 with axis 3 where axis 3 is the master and axis 2 is the partner axis for axis 3.
Initialization in the axis parameter list of axis 1
kopf.achs_nr 1
achs_mode 0x8001Initialization in the axis parameter list of axis 2
kopf.achs_nr 2
achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000Initialization in the axis parameter list of axis 3
kopf.achs_nr 3
achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 300000 | Collision monitoring does not take effect until reference point travel has taken place for the corresponding axes. |
Movement direction of the axes
Collison monitoring is done with the assumption that the mechanical movement direction of the axes is equal if for the axes a movement in the same direction is programmed. If that assumption is not satisfied this must be indicated by setting parameter P-AXIS-00262 (coll_moving_dir_inverted) in the axis parameter list of the master axis.
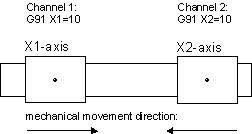 Fig.4: Collision pair with mechanically inverse movement directions
Fig.4: Collision pair with mechanically inverse movement directionsExample
Initialization in the axis parameter list of axis 1
kopf.achs_nr 1
achs_mode 0x8001Initialization in the axis parameter list of axis 1
kopf.achs_nr 2
achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
kenngr.coll_moving_dir_inverted 1Zero position of the axes
In case of diferent zero positions of the axes this offset must be entered in parameter P-AXIS-00263 (coll_zero_position_offset). The value of the parameter is equal to the position of the zero position of the collision partner axis in the axis coordinate system of the master axis.
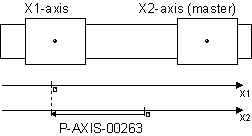 Fig.5: Collision pair with different zero positions
Fig.5: Collision pair with different zero positionsExample
Initialization in the axis parameter list of axis 1
kopf.achs_nr 1
achs_mode 0x8001Initialization in the axis parameter list of axis 2
kopf.achs_nr 2
achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
kenngr.coll_zero_position_offset -100000Axis deceleration for collision monitoring
As default collision monitoring is done with P-AXIS-00008 (a_max) to calculate the braking distance to decelerate the axes if a collision is detected.
With parameter P-AXIS-00267 (coll_use_a_emergency) this deceleration can be changed to the value defined in parameter P-AXIS-00003 (a_emergency).
Deceleration distance consideration
The current speed of an axis is the result of:
vt = (setptn - setptn-1) / TA vt Current speed
TA Interpolation cycle time
setp Position setpoints in cycles n and n-1
The minimum deceleration distance is the result of the braking deceleration defined by the parameters P-AXIS-00008 (a_max), P-AXIS-00267 (coll_use_a_emergency), P-AXIS-00003 (a_emergency) and the current speed as follows:
sbrake = ½ (vt2/acoll)
With:
sbrake Braking distance
vt Current speed
acoll Deceleration for collision monitoring.
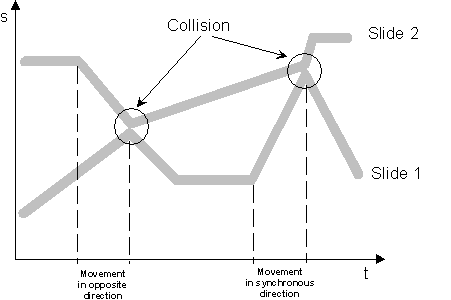 Fig.6: Possible collision scenarios
Fig.6: Possible collision scenarios