Adding EtherCAT master and drives
You can implement your drive in your TwinCAT project either manually or via an automatic scan. It is advisable to scan, because this will insert the required drive devices directly into the project.
TwinCAT in ConfigMode
To start the scanning process, TwinCAT must be in ConfigMode. ConfigMode is one of several TwinCAT states, which is displayed in the status bar of the System Manager. If the text is highlighted in blue, ConfigMode is activated, and the scan can be started. If the text is highlighted in green or red, follow these steps:
|
|
Click the blue gear icon in the toolbar. |
|
|
Confirm the state change with OK. |
|
|
TwinCAT switches to ConfigMode, and the text highlighting in the status bar turns blue. TwinCAT is in ConfigMode. |

 →
→ 
Start drive scanning
If the right target system and ConfigMode are enabled, the scan can be started.
|
|
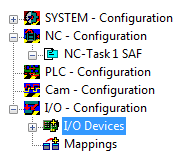
In the System Manager select I/O - Configuration → I/O Devices. Press the Scan in the toolbar or right-click on I/O Devices and select Scan Devices…. |
|
|
Close the information window with OK.
|
|
|
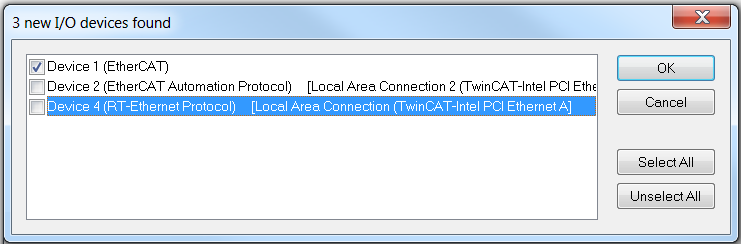
Select the devices to be automatically added to the TwinCAT project. Complete the selection with OK.
|

|
|
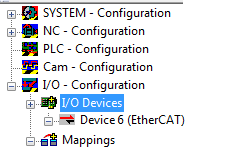
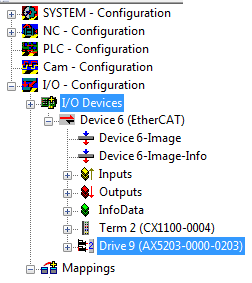
In the System Manager all selected devices are shown below the "I/O Configuration" icon. Confirm the subsequent query whether the boxes should be scanned with Yes If the query is answered in the negative, no boxes / EtherCAT slaves and therefore no drives are scanned. |
|
|
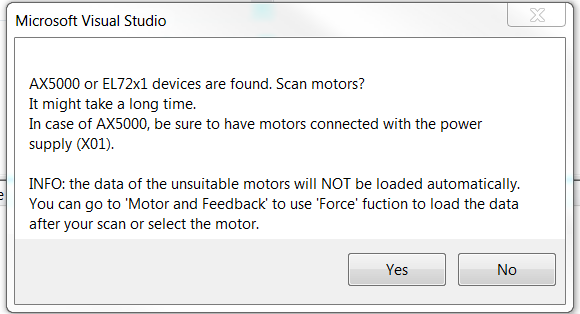
The message regarding a found servo drive or servo terminal can trigger a special scan for motors. Reads the electronic type plates of the motors and enters the data directly in the TCDriveManager. Confirm the query with Yes to read the electronic type plates. |
|
|
Wait for the scan to complete.
Confirm the query with Yes to create an NC axis configuration.
|
|
|
As a result of the automatic axis configuration creation, an axis is added for each motor that was found and linked accordingly. The created NC axis configuration is shown in the System Manager. Decline the request to activate Free Run with No.
|
→The drive is fully implemented in the TwinCAT project.