General Information
Speed reduction due to sudden load increase at constant speed in a machining operation (e.g. penetration of a drill bit into solid material) is implemented from firmware v2.03 by means of stall protection controller (KSR) function.
Special feature asynchronous motor
This function is only suitable for asynchronous motors without feedback system. The stall protection controller replaces the current controller. The maximum torque of an asynchronous motor is also the stalling torque. If the max. set torque is exceeded, an uncontrolled condition of the motor occurs. The result is an overcurrent error F2A1.
Typical torque / speed curve of an asynchronous motor
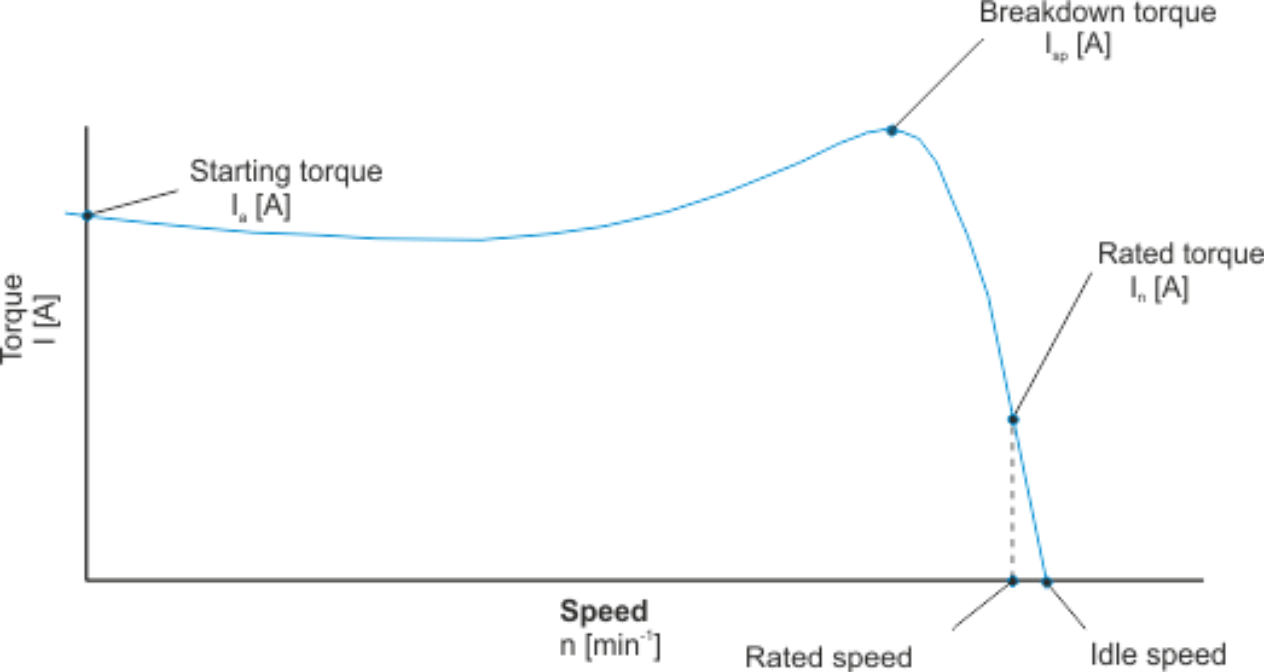
The diagram describes the characteristic curve at a rotary field frequency.
When operating with a stall protection controller, an attempt is always made to avoid the non-permissible range. A setpoint specification may not be adhered to as a result. If this is the case, your PLC must take appropriate measures to restore permissible operation.
Optimum configuration of application and motor
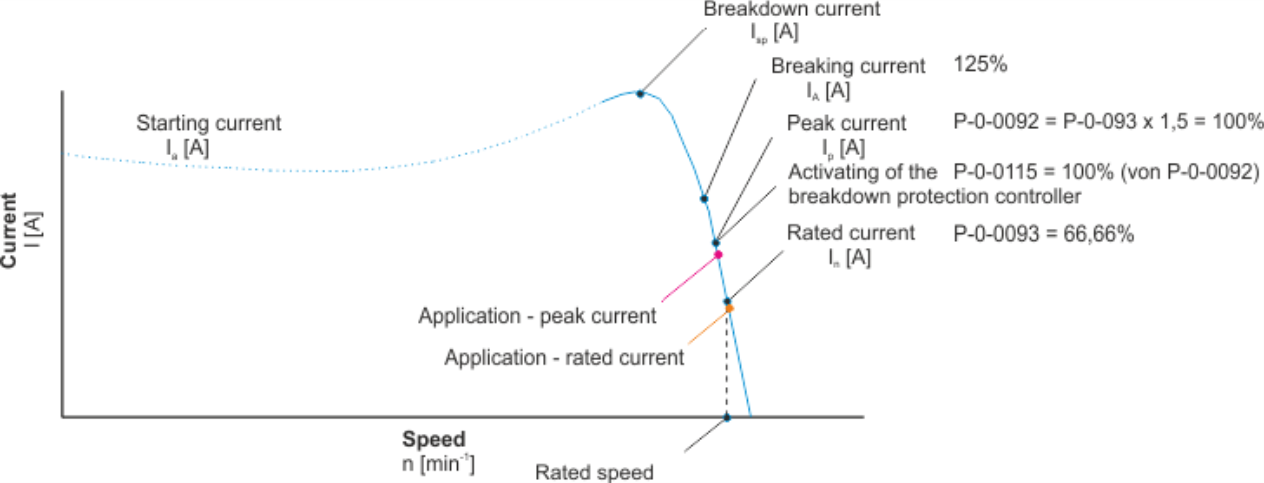 Fig.1: The image shows a rotary field frequency when the current is plotted against the speed.
Fig.1: The image shows a rotary field frequency when the current is plotted against the speed.If the application requires more current (torque), e.g. because the milling tool is becoming blunt, the current value moves to the left of the curve.
This applies mainly for the linear range (nominal current to cut-off current). The range beyond the stall current is not relevant, since it is not permitted.
With the AX5000, among others, the values
- P-0-0093 (nominal current) and
- P-0-0092 (peak current)*
*calculated from P-0-0093 and the overload factor (for ASM mostly 1.5)
taken over from the motor database.
The response of the stall protection controller with respect to the current limit (P-0-0115) would be:
- The stall protection controller is activated.
- The rotary field frequency is reduced. As a result, the current value does not exceed the current limit (P-0-0115) and thus prevents the cut-off current* from being reached.
*The servo drive switches the motor torque-free. It would come to an uncontrolled standstill.
Operation in the field weakening
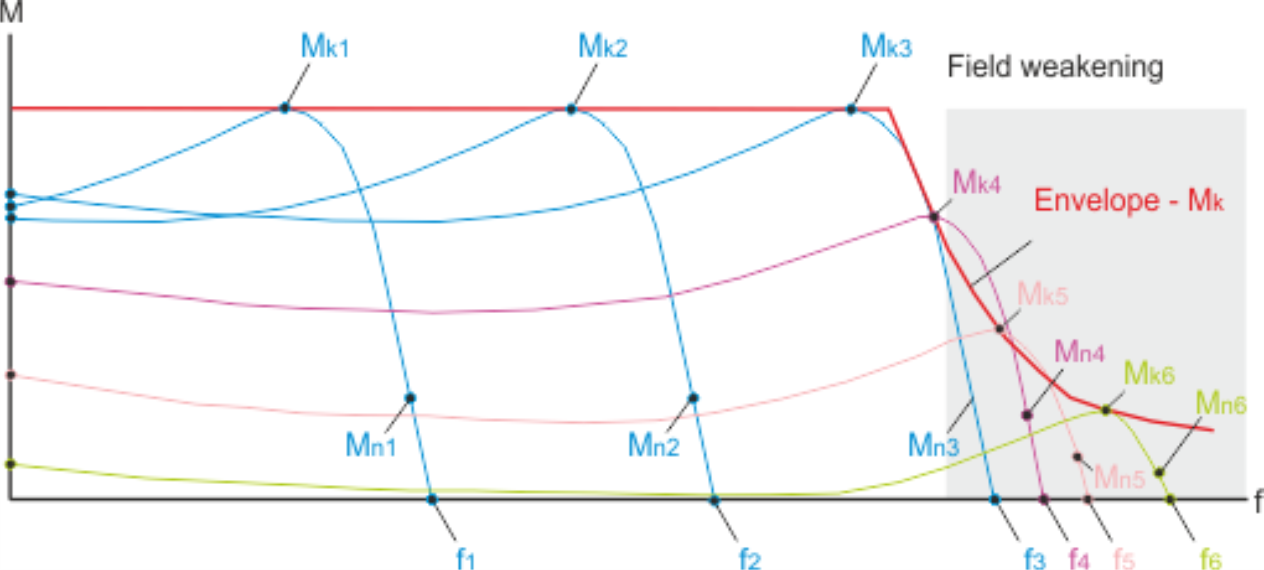
In the field weakening, the envelope follows the function M=1/n. In the linear range (Mk4 / Mk5), a decrease of the rotary field frequency causes a significant increase of the torque.
During operation of an asynchronous motor the torque curves may differ, depending on the rotary field frequency (f).
Behavior of the stalling torques with changed field weakening:
- Until the field weakening is reached, the stalling torques (Mk1 - Mk3) are equal.
- At the beginning of the field weakening, the stalling torques (Mk4 and Mk5) decrease almost linearly.
- With increasing field weakening (Mk6 and further), the stalling torque is very low and almost constant.