FB_PressureControlParams_PID
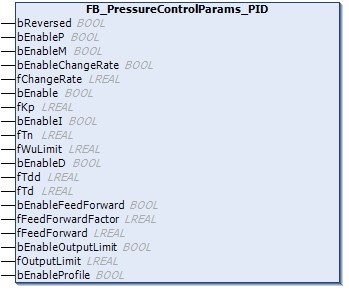
Dieser Funktionsbaustein enthält einen Parametersatz, der von einem Funktionsbaustein FB_PressureControl_PID verwendet werden soll.
Syntax:
FUNCTION_BLOCK FB_PressureControlParams_PID Eigenschaften
Eigenschaften
Name | Typ | Zugriff | Eigenschaften |
|---|---|---|---|
ChangeRate | LREAL | Get, Set | Die verwendete Rampenrate in Druckeinheiten pro Sekunde (typ. [bar/s]). Weitere Hinweise bei |
Enable | BOOL | Get, Set | Mit dieser Eigenschaft wird der Proportionalanteil des PID-Reglers aktiviert und deaktiviert. Weitere Hinweise bei |
EnableChangeRate | BOOL | Get, Set | Aktiviert eine Sollwertrampenfunktion. Der intern verwendete Sollwert für die Steuerung kann mit einer begrenzten Rate, angegeben als |
EnableOutputLimit | BOOL | Get, Set | Aktiviert eine Begrenzungsfunktion für die Ausgabe des Reglers (Stellgröße). Weitere Hinweise bei |
EnableD | BOOL | Get, Set | Aktiviert den Differenzial-Anteil des PID-Reglers. Weitere Hinweise bei |
EnableFeedForward | BOOL | Get, Set | Aktiviert eine Geschwindigkeitsvorsteuerung. Weitere Hinweise bei |
EnableI | BOOL | Get, Set | Aktiviert den integrierenden Anteil des PID-Reglers. Weitere Hinweise bei |
EnableNeg | BOOL | Get, Set | Aktiviert eine negative Ausgabe des Reglers. |
EnablePos | BOOL | Get, Set | Aktiviert eine positive Ausgabe des Reglers. |
EnableProfile | BOOL | Get, Set | Aktiviert die Verwendung des Sollwertprofiles per |
FeedForward | LREAL | Get, Set | Vorsteuerungswerte für die Geschwindigkeitsvorsteuerung. Wenn Im Falle einer Staudruckregelung kann mithilfe der Vorsteuerung die Rückwärtsgeschwindigkeit des Injektors an die Wirkung der Dosierachse angepasst werden. Dies kann der Regelungsgüte bei dynamischer Anpassung der Dosierdrehzahl positiv beitragen. |
FeedForwardFactor | LREAL | Get, Set | Verstärkungsfaktor für die Geschwindigkeitsvorsteuerung. Weitere Hinweise bei |
Kp | LREAL | Get, Set | Die proportionale Verstärkung des PID-Reglers. |
OutputLimit | LREAL | Get, Set | Begrenzung für die Ausgabe des Reglers. |
Reversed | BOOL | Get, Set | Kehrt die Ausgabe des PID-Reglers um. In manchen Anwendungsfällen muss sich die Achse in positiver Richtung bewegen, um einen Druck abzubauen. Typisches Beispiel ist die Nachdruck- und Staudruckregelung in Spritzgießmaschinen. |
Td | LREAL | Get, Set | Der Differenzial-Anteil des PID-Reglers. Der Wert wird in Geschwindigkeitseinheit * Sekunde pro Druckeinheit bemessen (typ. [mm/s * s / bar}) Die Antwort wird berechnet, wenn |
Tdd | LREAL | Get, Set | Dämpfung des Differenzial-Anteils des PID-Reglers. Weitere Hinweise bei |
Tn | LREAL | Get, Set | Der integrierende Anteil des PID-Reglers. Der Wert wird in Geschwindigkeitseinheit pro Druckeinheitssekunden berechnet (typ. [mm/s / (bar * s)]) Die Antwort wird berechnet, wenn |
WuLimit | LREAL | Get, Set | Wirkbegrenzung des integrierenden Anteils des PID-Reglers. Weitere Hinweise bei |
EnableM1 | BOOL | Get, Set | Veraltete Variante von |
EnableP1 | BOOL | Get, Set | Veraltete Variante von |
EnableClipping1 | BOOL | Get, Set | Veraltete Variante von |
1Obsolete
 Methoden
Methoden
Name | Beschreibung |
|---|---|
Diese Methode wird verwendet, um BOOL-Parameter der Steuerung auszulesen. Siehe E_PressureControlParam für weitere Einzelheiten. | |
Diese Methode wird verwendet, um LREAL-Parameter der Steuerung auszulesen. Siehe E_PressureControlParam für weitere Einzelheiten. | |
Diese Methode wird verwendet, um BOOL-Parameter der Steuerung zu definieren. Siehe E_PressureControlParam für weitere Einzelheiten. | |
Diese Methode wird verwendet, um LREAL-Parameter der Steuerung zu definieren. Siehe E_PressureControlParam für weitere Einzelheiten. |
 Schnittstellen
Schnittstellen
Name | Beschreibung |
|---|---|
I_PressureControlParams_PID | Standardschnittstelle auf FB_PressureControlParams_PID |
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS-Bibliotheken |
|---|---|---|
TwinCAT v3.1.4024.66 | PC oder CX (x64, x86) | Tc3_PlasticFunctions (>= v12.10.0.0) |