Kommandierung
Mehrere Steuerungs- bzw. Stellbefehle eines kommandierbaren Objektes haben Einfluss auf den Ausgabewert PresentValue. Alle Befehle werden in einem Array gespeichert. Der Befehl mit der höchsten Priorität bestimmt das Ergebnis am Ausgang des Objektes.
Eine Priorität kann einen Wert zwischen 1 und 16 erhalten. Die höchste Priorität hat den Wert 1.
Die folgenden Objekte in TwinCAT 3 Building Automation sind kommandierbare Objekte und besitzen somit ein Prioritäten-Array.
|
FB |
Typ |
Beschreibung |
|---|---|---|
|
FB_BA_BO_Raw |
BO |
Binärer Ausgang mit externer Deklaration der Variablen für das Mapping der Hardware. |
|
FB_BA_BO |
BO |
Binärer. |
|
FB_BA_BO_IO |
BO |
Binärer Ausgang mit interner Deklaration der Variablen für das Mapping der Hardware. |
|
FB_BA_AO_Raw |
AO |
Analoger Ausgang mit externer Deklaration der Variablen für das Mapping der Hardware. |
|
FB_BA_AO |
AO |
Analoger. |
|
FB_BA_AO_IO |
AO |
Analoger Ausgang mit interner Deklaration der Variablen für das Mapping der Hardware. |
|
FB_BA_MO_Raw |
MO |
Multi State Ausgang mit externer Deklaration der Variablen für das Mapping der Hardware. |
|
FB_BA_MO |
MO |
Multi State Ausgang. |
|
FB_BA_MO_IO |
MO |
Multi State Ausgang mit interner Deklaration der Variablen für das Mapping der Hardware. |
|
FB_BA_BV |
BV |
Binary-Value-Objekt. |
|
FB_BA_MV |
MV |
Multistate-Value-Objekt. |
|
FB_BA_AV |
AV |
Analog-Value-Objekt. |
Damit ein Eintrag in das Priority Array eines Objektes erfolgt, muss der zugehörige Freigabeeingang bEn… am dem Funktionsbaustein TRUE sein.
Die Priorität Manual Remote wird nicht mittels eines Eingangs am Funktionsbaustein, sondern durch das Beschreiben einer Parametervariablen aktiviert. Die Kommandierung des Objektes erfolgt entweder über das BACnet-Protokoll z. B. von einer MBE oder von TwinCAT via ADS.
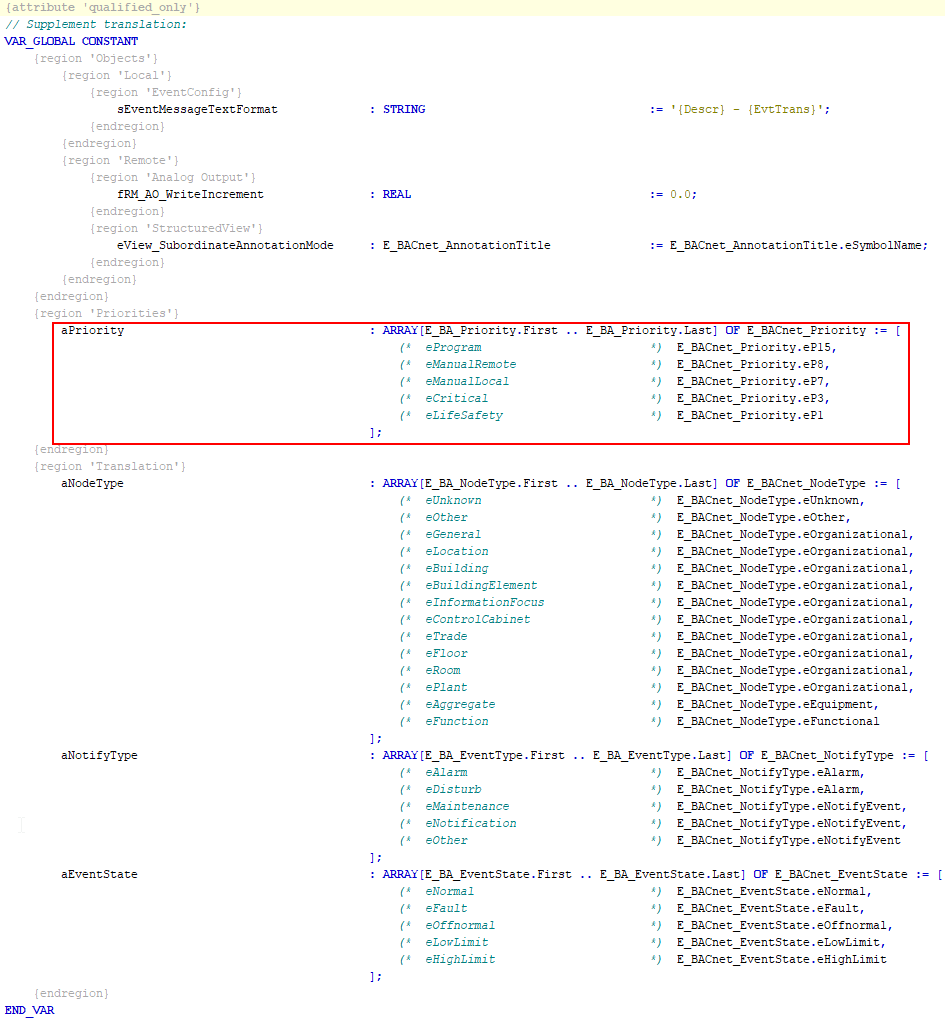
Die folgenden Prioritäten sind an den Objekten von der TwinCAT Building Automation vordefiniert:
|
Name |
Beschreibung |
Symbol Freigabe |
Symbol Wert |
Default Prio |
|---|---|---|---|---|
|
Safety |
Personensicherheit |
bEnSafety |
*ValSfty |
1 |
|
Critical |
Anlagensicherheit |
bEnCrit |
*ValCritical |
3 |
|
ManLoc |
Lokale manuelle Übersteuerung (LVB) |
bEnManLoc |
*ValManLoc |
7 |
|
ManualRm |
Manuelle Übersteuerung aus der Ferne (MBE) |
bEnManualRm |
*ValManualRm |
8 |
|
Pgm |
Programmsteuerung |
bEnPgm |
*ValPgm |
15 |
Je nach Art des Objektes ob Analog, Binär oder Multi-State, ist der Wert eines Kommandos ein REAL, BOOL oder UDINT.
Ändern der Prioritäten
Die Prioritäten können in der Variablenliste BA_BACnet_Param geändert werden.
Die aktive Priorität wird am Ausgang aller zu kommandierenden Objekte mittels der Variablen eActivePrio angezeigt.
Variablen
Name | Typ | Beschreibung |
|---|---|---|
bEnSafety | BOOL | Freigabe der Priorität „Safety“. |
fValSafety | REAL | Analoger Wert für die Priorität „Safety“. |
bValSafety | BOOL | Binärer Wert für die Priorität „Safety“. |
nValSafety | INT | Integer Wert für die Priorität „Safety“. |
bEnCritical | BOOL | Freigabe der Priorität „Critical“. |
fValCritical | REAL | Analoger Wert für die Priorität „Critical“. |
bValCritical | BOOL | Binärer Wert für die Priorität „Critical“. |
nManCritical | INT | Integer Wert für die Priorität „Critical“. |
bEnManLocal | BOOL | Freigabe der Priorität „Manual Local“. |
fValManLocal | REAL | Analoger Wert für die Priorität „Manual Local“. |
bValManLocal | BOOL | Binärer Wert für die Priorität „Manual Local“. |
nManLocal | INT | Integer Wert für die Priorität „Manual Local“. |
bEnManualRm | BOOL | Freigabe der Priorität „Manual Remote“. |
fValManualRm | REAL | Analoger Wert für die Priorität „Manual Remote“. |
bValManualRm | BOOL | Binärer Wert für die Priorität „Manual Remote“. |
nManualRm | INT | Integer Wert für die Priorität „Manual Remote“. |
bEnPgm | BOOL | Freigabe der Priorität „Program“. |
fValPgm | REAL | Analoger Wert für die Priorität „Program“. |
bValPgm | BOOL | Binärer Wert für die Priorität „Program“. |
nPgm | INT | Integer Wert für die Priorität „Program“. |