FB_VN_GevCameraControl
This FB provides the basic functionality to control a GigE Vision camera and access its calibration data.
Do not call the main FB directly. Only use the available methods.
 Methods
Methods
|
Name |
Description |
|---|---|
|
Delete all images contained in the TcVnGevImageProvider TcCOM module receive queue and reset the corresponding omitted images counter. | |
|
Close the control channel to the camera. | |
|
Gets the reference calibration pattern points from the TcVnGevImageProvider TcCOM module (Can be set from the calibration assistant) | |
|
Gets the camera matrix from the TcVnGevImageProvider TcCOM module (requires intrinsic calibration parameters, e.g. set by the calibration assistant) | |
|
Gets the current available image (first in receive queue). | |
|
Gets the current available image (first in receive queue) with undistortion applied. Incompatible with pixel formats that contain an encoding, e.g. a Bayer pattern. Requires intrinsic calibration parameters in the TcVnGevImageProvider TcCOM module, e.g. set by the calibration assistant. | |
|
Gets the current available image (first in receive queue) and its corresponding GVSP info. | |
|
Gets the current available image (first in receive queue) with its corresponding GVSP info and undistortion applied. Incompatible with pixel formats that contain an encoding, e.g. a Bayer pattern. Requires intrinsic calibration parameters in the TcVnGevImageProvider TcCOM module, e.g. set by the calibration assistant. | |
|
Gets the current available image (first in receive queue) and corresponding timestamps. | |
|
Gets the distortion coefficients from the TcVnGevImageProvider TcCOM module (requires intrinsic calibration parameters, e.g. set by the calibration assistant) | |
|
Gets the current number of images in the receive queue. | |
|
Gets the last received image from the queue. | |
|
Gets the number of omitted images since the last call of ClearImageQueue(). If the image receive queue in the TcVnGevImageProvider TcCOM module is full and a new image arrives, the first one in the queue will be deleted and the omitted counter is increased. | |
|
Gets the rotation matrix from the TcVnGevImageProvider TcCOM module (requires extrinsic calibration parameters, e.g. set by the calibration assistant) | |
|
Gets the current state of the internal camera control state machine. | |
|
Gets the translation vector from the TcVnGevImageProvider TcCOM module (requires extrinsic calibration parameters, e.g. set by the calibration assistant) | |
|
Initialize the camera to the intended state (includes sending the 'InitCameraCommands' defined in the GevImageAcquisition TcCOM module to the camera). | |
|
Open a control channel to the camera. | |
|
Reset the camera controller to initial state (might require multiple calls depending on current state, until S_OK is returned) | |
|
Reset the camera features to initial state (sends the 'InitCameraCommands' defined in the GevImageAcquisition TcCOM module to the camera). | |
|
Sets the camera matrix to the TcVnGevImageProvider TcCOM module | |
|
Sets the distortion coefficients to the TcVnGevImageProvider TcCOM module | |
|
Sets the rotation matrix to the TcVnGevImageProvider TcCOM module | |
|
Sets the translation vector to the TcVnGevImageProvider TcCOM module | |
|
Send the 'StartAcquisitionCommands' defined in the TcVnGevImageProvider TcCOM module to the camera. | |
|
Send the 'StopAcquisitionCommands' defined in the TcVnGevImageProvider TcCOM module to the camera. | |
|
Send the 'SoftwareTriggerCommands' defined in the TcVnGevImageProvider TcCOM module to the camera. |
Weiterführende Informationen
Der Funktionsblock FB_VN_GevCameraControl repräsentiert GigE Vision Camera Objekte im vollen Umfang in der SPS. Alternativ kann für einen beschränkten Zugriff auf Kamera Objekte auch der Funktionsblock FB_VN_SimpleCameraControl genutzt werden.
Dieser Funktionsblock ist nicht dafür gedacht, direkt aufgerufen zu werden. Vielmehr enthalten die Methoden sämtliche Funktionalität.
Zustandsautomat
Die nachfolgende Grafik zeigt den Zustandsautomaten. Die Hauptzustände sind dabei blau gekennzeichnet, die Übergangszustände grau und der Error-Zustand rot. In welchem Zustand sich die Kamera befindet, kann über die Methode GetState abgefragt werden. Zudem ist dargestellt, mit welchen Methoden ein Zustandsübergang erreicht werden kann und zu welchem Rückgabewert dieser jeweils führt. Wenn Init Commands vorhanden sind und der InitializationAutoMode AUTOINIT_AFTER_SO ausgewählt wurde, wird auch kurzzeitig der State INITIALIZING angenommen, in dem die automatische Initialisierung erfolgt.
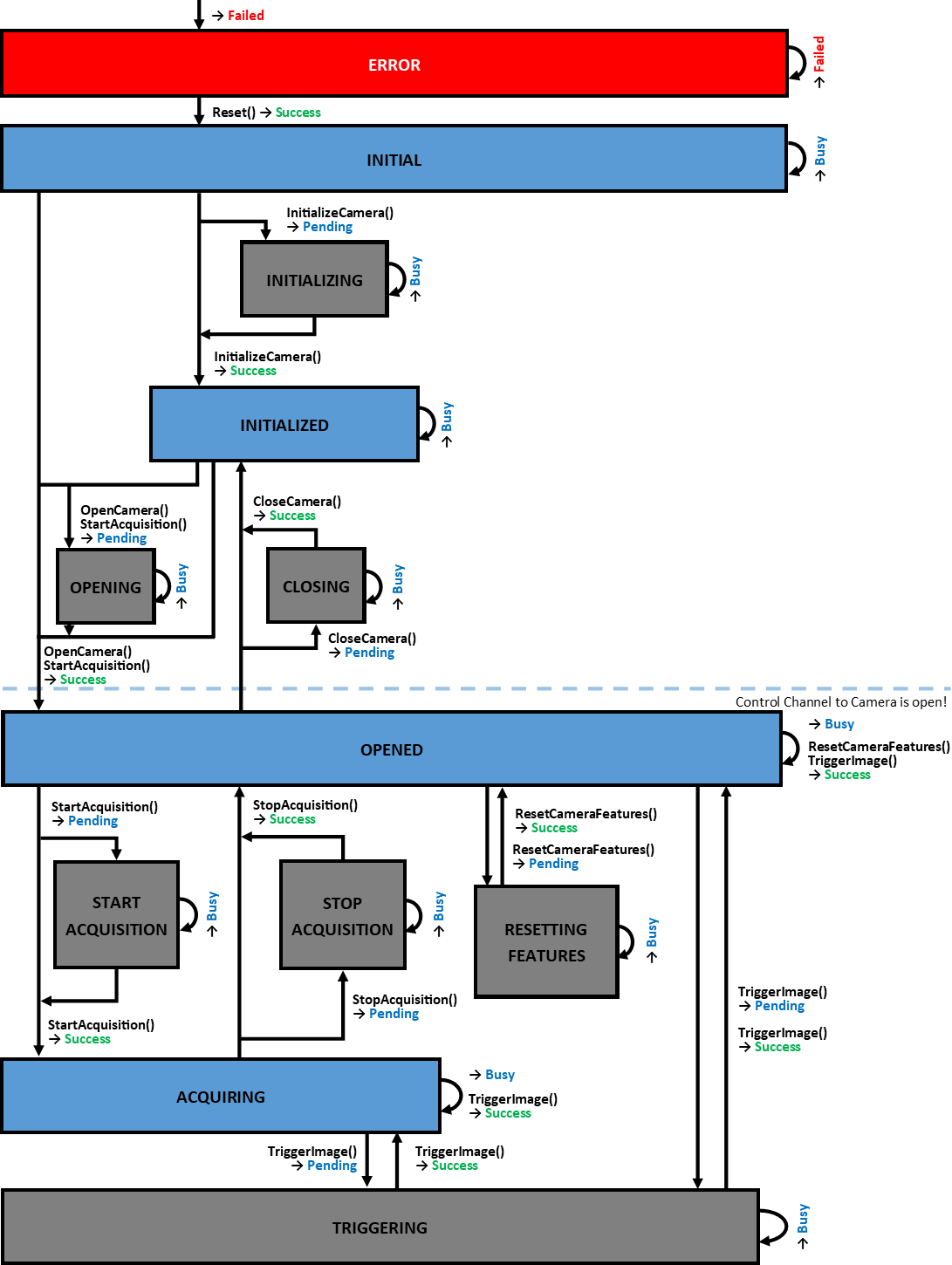
Den aktuellen Zustand können Sie mit der Methode GetState abfragen.
Zur Steuerung des Zustandsautomaten können folgende Methoden verwendet werden:
- GetState
- InitializeCamera
- OpenCamera
- CloseCamera
- StartAcquisition
- StopAcquisition
- TriggerImage
- ResetCameraFeatures
- Reset
Wenn eine Methode in einem Zustand aufgerufen wird, für den sie nicht gedacht ist, wird der Fehlercode INVALIDSTATE (16#712) zurückgegeben.
HRESULT
Hex | Dec | Code | Beschreibung |
|---|---|---|---|
16#718 | 1816 | NOTINIT | Kamera wurde noch nicht initialisiert. Initialisieren Sie die Kamera entweder mit der Methode InitializeCamera oder indem Sie den TcCOM-Parameter InitializationAutoMode auf AUTOINIT_SO oder AUTOINIT_AFTER_SO setzen. |
16#71A | 1818 | NOINTERFACE | Der Kamera-Funktionsblock ist nicht mit dem Kamera-TcCOM-Objekt verknüpft. Stellen Sie diese Verknüpfung in der TwinCAT Projektinstanz unter Symbol Initialization her. |
Anwendung mit kontinuierlichem Bildeinzug
Ein Zustandsautomat, um eine Kamera in den Bildaufnahme-Modus zu bringen, Fehlerzustände zu behandeln und kontinuierlich erfolgreich aufgenommene Bilder anzuzeigen, sieht z. B. so aus:
VAR
hr : HRESULT;
ipImageIn : ITcVnImage;
ipImageInDisp : ITcVnDisplayableImage;
fbCameraControl : FB_VN_GevCameraControl;
eCameraState : ETcVnCameraState;
nNewImageCounter: UINT;
END_VAR
eCameraState := fbCameraControl.GetState();
// CameraControl is in error state, so try to reset the camera connection
IF eCameraState = TCVN_CS_ERROR THEN
hr := fbCameraControl.Reset();
// Camera not yet initialized
ELSIF eCameraState < TCVN_CS_INITIALIZED THEN
hr := fbCameraControl.InitializeCamera();
// Camera not yet opened
ELSIF eCameraState < TCVN_CS_OPENED THEN
hr := fbCameraControl.OpenCamera();
// Camera not yet streaming
ELSIF eCameraState < TCVN_CS_ACQUIRING THEN
hr := fbCameraControl.StartAcquisition();
// Camera streaming
ELSIF eCameraState = TCVN_CS_ACQUIRING THEN
hr := fbCameraControl.GetCurrentImage(ipImageIn);
// Check if new Image was received
IF SUCCEEDED(hr) AND ipImageIn <> 0 THEN
nNewImageCounter := nNewImageCounter + 1;
// Place to call vision algorithms
hr := F_VN_TransformIntoDisplayableImage(ipImageIn, ipImageInDisp, hr);
END_IF
END_IFIn diesem Fall kann die Kamera auf kontinuierliche Bild-Akquise oder auf einen Hardwaretrigger konfiguriert werden.
Anwendung mit Softwaretrigger
Ein Zustandsautomat, um eine Kamera in den Bildaufnahme-Modus zu bringen, Fehlerzustände zu behandeln und per Softwaretrigger eine Bildaufnahme anzutriggern, sieht z. B. so aus:
VAR
hr : HRESULT;
ipImageIn : ITcVnImage;
ipImageInDisp : ITcVnDisplayableImage;
fbCameraControl : FB_VN_GevCameraControl;
eCameraState : ETcVnCameraState;
nNewImageCounter: UINT;
bTrigger : BOOL := TRUE;
END_VAR
eCameraState := fbCameraControl.GetState();
// CameraControl is in error state, so try to reset the camera connection
IF eCameraState = TCVN_CS_ERROR THEN
hr := fbCameraControl.Reset();
// Camera trigger image
ELSIF eCameraState = TCVN_CS_TRIGGERING THEN
hr := fbCameraControl.TriggerImage();
// Camera not yet initialized
ELSIF eCameraState < TCVN_CS_INITIALIZED THEN
hr := fbCameraControl.InitializeCamera();
// Camera not yet opened
ELSIF eCameraState < TCVN_CS_OPENED THEN
hr := fbCameraControl.OpenCamera();
// Camera not yet streaming
ELSIF eCameraState < TCVN_CS_ACQUIRING THEN
hr := fbCameraControl.StartAcquisition();
// Camera streaming
ELSIF eCameraState = TCVN_CS_ACQUIRING THEN
IF bTrigger THEN
hr := fbCameraControl.TriggerImage();
IF SUCCEEDED(hr) THEN
bTrigger := FALSE;
END_IF
ELSE
hr := fbCameraControl.GetCurrentImage(ipImageIn);
// Check if new Image was received
IF SUCCEEDED(hr) AND ipImageIn <> 0 THEN
nNewImageCounter := nNewImageCounter + 1;
// Trigger next image
bTrigger := TRUE;
// Place to call vision algorithms
hr := F_VN_TransformIntoDisplayableImage(ipImageIn, ipImageInDisp, hr);
END_IF
END_IF
END_IFIn diesem Fall muss die Kamera auf einen Softwaretrigger (TriggerSource = Software) konfiguriert werden.
Verwandte Funktionsblöcke
- FB_VN_SimpleCameraControl für Kameras und File Sources
- FB_VN_GevCameraControl für GigE Vision Kameras
- FB_VN_FileSourceControl für File Sources
Required License
TC3 Vision Base
System Requirements
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT V3.1.4024.59 or later | PC or CX (x64) with min. PL50, e.g. Intel 4-core Atom CPU | Tc3_Vision |
- ClearImageQueue
- CloseCamera
- GetCalibPatternRef
- GetCameraMatrix
- GetCurrentImage
- GetCurrentImageUndistorted
- GetCurrentImageWithGvspInfo
- GetCurrentImageWithGvspInfoUndistorted
- GetCurrentImageWithTimestamps
- GetDistortionCoefficients
- GetLastImageFromQueue
- GetOmittedImagesNum
- GetRotationMatrix
- GetState
- GetTranslationVector
- InitializeCamera
- OpenCamera
- Reset
- ResetCameraFeatures
- SetCameraMatrix
- SetDistortionCoefficients
- SetRotationMatrix
- SetTranslationVector
- StartAcquisition
- StopAcquisition
- TriggerImage
- GetImageQueueSize