Übersicht
TwinCAT 3 Modbus RTU bietet Funktionsbausteine zur seriellen Kommunikation mit Modbus-Endgeräten.
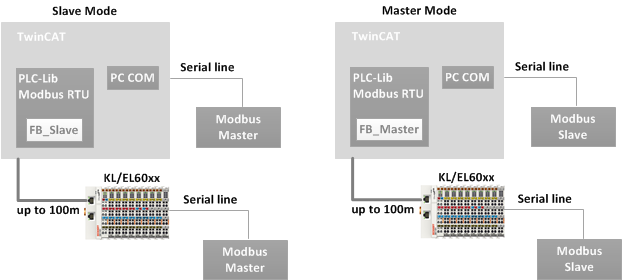
Modbus RTU Geräte werden per serieller Schnittstelle mit einem Beckhoff Controller verbunden. Die TwinCAT SPS verwendet Slave Funktionsbausteine der Modbus RTU Bibliothek um mit einem Modbus Master zu kommunizieren (Slave Mode). Zusätzlich sind Master Funktionsbausteine verfügbar, um mehrere Modbus Slaves anzusprechen (Master Mode)
Unterstützte Schnittstellen
- Serieller COM-Port eines PC oder CX
- Serielle Busklemmen KL60xx
- Serielle EtherCAT-Klemmen EL60xx
- Virtueller serieller COM-Port (USB-Port) eines PC oder CX
- Bei zusätzlicher Verwendung (und Lizenzierung) von TF6340 TwinCAT 3 Serial Communication
Weiterführende Dokumentation
Technische Details und Spezifikationen über Modbus finden Sie unter: http://www.modbus.org
Randbedingungen
Das Modbus-Protokoll definiert ein exaktes Timing, so sollen z. B. alle Zeichen eines Telegramms lückenlos übertragen werden. Da die Kommunikation Modbus RTU auf einer SPS-Steuerung realisiert wird, kann wegen der zyklischen Abarbeitung des SPS-Programms, dieses exakte Timing nicht garantiert werden. Die meisten Endgeräte sind sehr tolerant und verhalten sich problemlos, falls kurze Zeitlücken zwischen den Zeichen auftreten. Im Einzelfall muss das Verhalten des Endgerätes überprüft werden.
Bei einer EL60x2 ist der zweite Kanal nicht für ModbusRTU-Kommunikation geeignet, da dieser Low Prior bearbeitet wird und dadurch die Frames mit Lücken versendet, was wiederum die Gegenstelle als Frame Error detektieren könnte.
 | Bei einigen seriellen Schnittstellen Klemmen kann ein Interner Buffer vor dem Senden gefüllt werden (Option kontinuierliches Senden). Die Bibliothek ModbusRTU kann diese Funktion verwenden, wenn dies in der entsprechenden seriellen Klemme eingestellt ist. Zum Beispiel kann bei der KL6031 mit dem Konfigurationsbaustein KL6configuration der ContinuousMode aktiviert werden (Register 34 Bit 6). Damit werden dann bis zu 128 Byte in den internen Buffer der Busklemme gelegt und kontinuierlich gesendet. |