Achsobjekte mit Hardware verknüpfen
- Eine MC3-Achse wurde erstellt und deren Achs- und Encodertyp konfiguriert,
siehe Achse hinzufügen. - Eine Hardwarekonfiguration wurde angelegt,
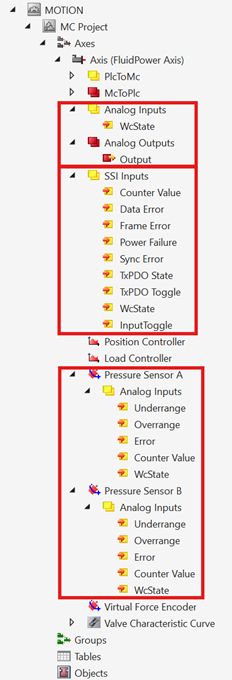
siehe Anfügen eines IO-Gerätes. - Eine Achskonfiguration wurde angelegt (Drucksensoren A/B, Achstyp Analog Drive, Encodertyp SSI Encoder).
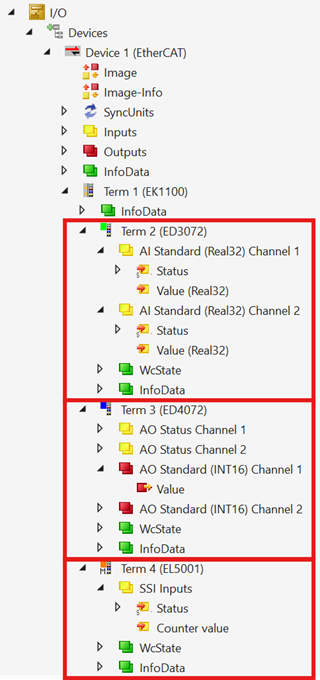
- Eine Hardwarekonfiguration wurde angelegt (Ain-, Aout- und SSI-Klemme).
- 1. Wählen Sie den zu verknüpfenden Link aus der Achskonfiguration,
z. B. Pressure Sensor A → Counter Value zur Verknüpfung des Zähleingangs des Drucksensors A. - 2. Machen Sie einen Rechtsklick auf Change Link…
- 3. Selektieren Sie den zu verknüpfenden Link der Hardware,
z. B. EL3074 → Value zur Verknüpfung des Analogeingangs 1. - 4. Bestätigen Sie die Auswahl mit OK.
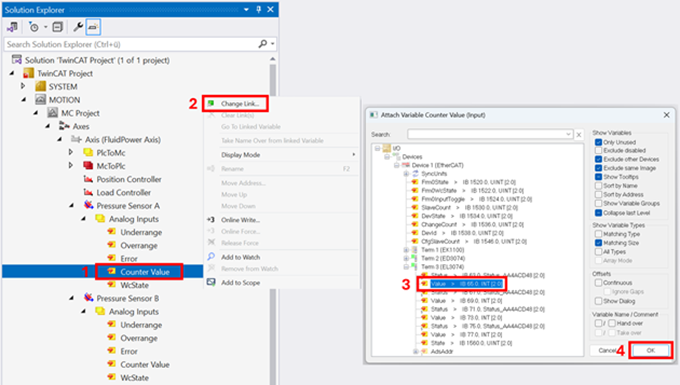
- 5. Wiederholen Sie den Vorgang für alle in der Achs- und Hardwarekonfiguration verfügbaren Links.
- In der Konfiguration des Solution Explorers im Projektbaum sind alle Variablen aus dem zyklischen IO-Interface verknüpft und mit einem weißen Symbol versehen.
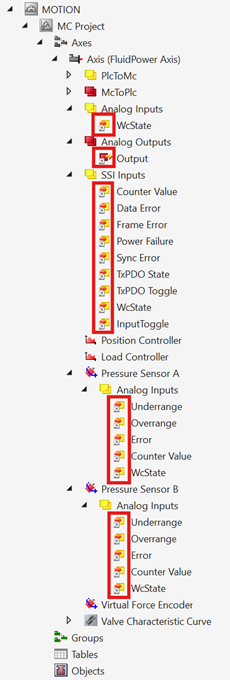
- 6. Aktivieren Sie das TwinCAT-Projekt.
Im nächsten Schritt folgt die Parametrierung des SSI-Encoder,
siehe Wegmesssystem einstellen.