Positionsregler
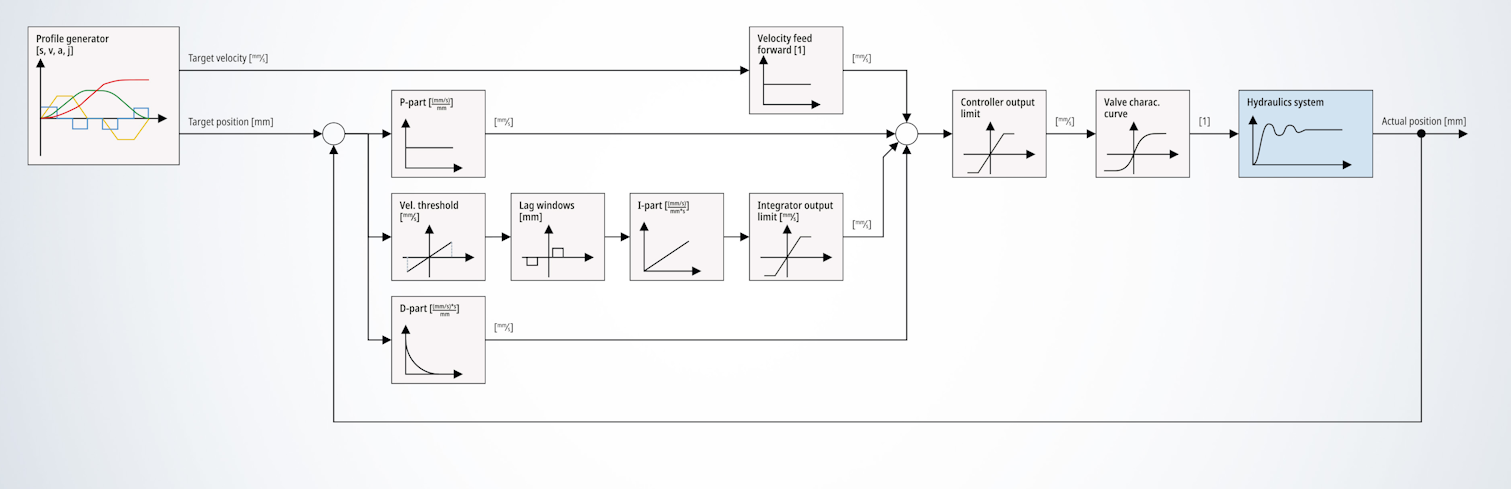
Der Sollwertgenerator basiert auf einem 7‑Phasen-Profil zur definierten Trajektorienvorgabe, welche Beschleunigungs-, Geschwindigkeits- und Verzögerungssollwerte berücksichtigt. Die Regelung erfolgt über einen klassischen PID-Regler, wobei der Integrationsanteil (I) mit spezifischen Anpassungen versehen ist, um Integrationsüberschwingen, Schwebung und Drift zu vermeiden.
Zur Verbesserung des dynamischen Verhaltens wird eine Geschwindigkeitsvorsteuerung implementiert, die den Regler entlastet und die Reaktionszeit auf Sollwertänderungen verkürzt. Im Anschluss erfolgt die nachgelagerte Reglerlimitierung sowie die Einbindung der Ventilkennlinie als nichtlineare Stellgrößenkompensation. Dadurch werden auch die charakteristischen Durchflusskennwerte des verwendeten Ventils in die Regelung integriert, was eine linearisierte Stellgrößenwirkung und höhere Genauigkeit im gesamten Arbeitsbereich gewährleistet.
Das folgende Blockschaltbild zeigt die grafische Darstellung des Positionsreglers:
- Erklärungen zu den Regelparametern, siehe Init Parameter.
- Erläuterungen zu den Onlineparametern, siehe Online Parameter