Real-Time
Die Berechnung der Achsen der TwinCAT MC3 lässt sich bedarfsgerecht auf mehrere CPU-Kerne verteilen. Eine Achse ist einer zyklischen Task zugeordnet. Einer Task können mehrere Achsen zugeteilt sein. Die Zykluszeiten und Priorisierungen können anhand der Aufgabe der Achsen für eine Task eingestellt werden. Dabei sind synchronisierte Bewegungen über alle verwendeten CPU-Kerne möglich.
Die Zuordnung von Tasks zu CPU-Kernen erfolgt im TwinCAT-Projekt unter SYSTEM > Real-Time > Settings. Um die aktuelle CPU-Kern-Konfiguration des Zielsystems anzuzeigen, klicken Sie auf Read from Target. Anschließend können die Tasks auf die entsprechenden Kerne verteilt werden.
Um die CPU-Kern-Konfiguration des Zielsystems zu verändern, klicken Sie auf Set on Target und wählen die gewünschte Verteilung von geteilten und isolierten Kernen aus.
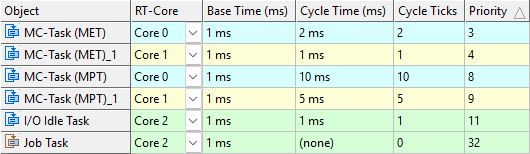
Auch auf dem gleichen CPU-Kern können Achsen mit unterschiedlichen Zykluszeiten betrieben werden, indem die Achsen verschiedenen Kontexten zugeordnet werden. Die „schnellste“ Achse gibt somit nicht den Takt für alle Achsen vor. Dies ermöglicht eine optimierte Ausnutzung eines CPU-Kerns – bereits für einige wenige Achsen.