Kollisionsvermeidung zwischen Planar-Movern und Planar-Tracks
Operationsmodus des Tracks und die Kollisionsvermeidung
Wie bereits im Abschnitt Operationsmodi Planar-Track beschrieben, hängt das Verhalten von Planar-Tracks in der Planar-Group von ihrem Operationsmodus ab. Im Operationsmodus „Moving“ blockiert ein Planar-Track die gesamte Fläche aller Punkte, die einen Abstand geringer (oder gleich) als den maximalen Radius der Mover haben. Der maximale Radius der Mover ergibt sich dabei aus den beiden Parameter des Tracks „Maximal mover width/height“. In allen anderen Operationsmodi blockiert der Track seine Fläche nicht.
Befehlsmodi der Mover und die Kollisionsvermeidung
Planar-Mover blockieren ihre Geometrie immer in der Planar-Group, es sei denn, sie befinden sich im Befehlsmodus OnTrack und ihr Track ist im Operationsmodus Moving. In diesem Fall geht die Verantwortung für die 2D Kollisionsvermeidung vom Mover auf den Track über und die Mover auf dem Track halten Abstand über die 1D-Kollisionsvermeidung auf dem Track.
Kollisionsmöglichkeiten
Der erste MoveOnTrack-Befehl eines Planar-Movers auf einem Planar-Track kann durch einen Kollisionsfehler abgelehnt werden. Dies geschieht z. B., wenn ein anderer Planar-Mover im Operationsmodus FreeMovement mit seiner Geometrie einen Abstand zum Planar-Track hat, der geringer (oder gleich) ist als der maximale Radius des Planar-Tracks. Umgekehrt kann ein MoveToPosition-Befehl eines Planar-Movers abgelehnt werden mit einem Kollisionsfehler, wenn die resultierende Kollisionsgeometrie einen Abstand zum Planar-Track hat, der geringer (oder gleich) ist als der maximale Radius des Planar-Tracks.
Beispiel
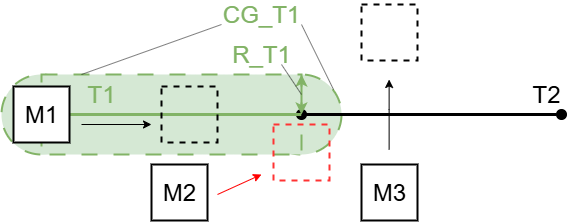
| M1, M2, M3 | Mover 1, Mover 2, Mover 3 |
| R_T1 | max. Radius |
| CG_T1 | Kollisionsgeometrie |
| T1, T2 | Track 1, Track 2 |
In diesem Beispiel bewegt sich Planar-Mover 1 (M1) auf Planar-Track 1 (T1). Dadurch befindet sich Planar-Track 1 im Operationsmodus Moving und blockiert seine Kollisionsgeometrie (in grün). Diese ergibt sich aus allen Punkten, die einen Abstand zum Planar-Track 1 haben, der kleiner (oder gleich) dem maximalen Radius (R_T1) ist. Der MoveToPosition-Befehl des Planar-Movers 2 (M2) wird daher abgelehnt, da seine Zielposition mit der Kollisionsgeometrie des Planar-Tracks 1 kollidiert. Der MoveToPosition-Befehl des Planar-Movers 3 (M3) wird nicht abgelehnt, da seine Zielposition und Bewegung mit der Kollisionsgeometrie des Planar-Tracks 1 nicht kollidiert und Planar-Track 2 im Operationsmodus Standing seine Kollisionsgeometrie nicht blockiert. Während der Bewegung des Planar-Movers 3 kann nun kein Mover eine Bewegung auf dem Planar-Track 2 ausführen. Diese würde mit einer Kollision mit Planar-Mover 3 abgelehnt.