Beispiel „Planar-Mover in CRotationFreeMovement-Modus verfahren“
Anhand dieser kurzen Anleitung werden Sie ein TwinCAT-Projekt anlegen, das einen Planar-Mover enthält und auf einfache Weise verfährt.
Planar-Mover anlegen
- Siehe Konfiguration.
- 1. Legen Sie einen Planar-Mover an.
- 2. Versetzen Sie „Parameter (Init)“ in den Simulationsmodus (
TRUE). Der Parameter ist versteckt und wird nur sichtbar, wenn die Checkbox „Show Hidden Parameters“ aktiviert ist.
PLC anlegen
- Siehe Vorabschritte PLC anlegen.
- 1. Legen Sie über MAIN den oder die Mover („MC_PlanarMover“) wie folgt an.
- Diese/r repräsentiert den/die Mover in der MC Configuration.
- 2. Legen Sie, wie nachfolgend gezeigt, einen Planar-Mover, eine Zustandsvariable für eine Zustandsmaschine und eine Zielposition für einen Fahrbefehl des Movers an.
PROGRAM MAIN
VAR
mover : MC_PlanarMover;
state : UDINT;
target_position_c : LREAL;
END_VAR- 3. Programmieren Sie anschließend in der MAIN einen Ablauf.
- Dieser Programmcode aktiviert den Mover und dreht ihn auf die Position c=20.
CASE state OF
0:
mover.Enable(0);
state := 1;
1:
IF mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled THEN
state := 2;
END_IF
2:
target_position_c := 20.0;
mover.MoveC(0, target_position_c, 0, 0);
state := 3;
END_CASEBefehl abschicken
- 4. Um den Befehl abzuschicken, müssen Sie den Mover nach dem END_CASE zyklisch mit seiner Update-Methode aufrufen:
mover.Update();Durch das Bauen der PLC wird ein Symbol des „PLC-Movers" erzeugt, welches anschließend mit der Mover-Instanz im MC-Projekt verknüpft werden kann.
- 1. Verwenden Sie zum Bauen den Pfad PLC > Untitled1 > Untitled1 Project > Build.
- Anschließend kann der Planar-Mover im „MC Project“ (Doppelklick) mit dem Button Link To PLC… im Reiter Settings verknüpft werden.
Projekt aktivieren und starten
- 1. Aktivieren Sie die Konfiguration über den Button in der Menüleiste
 .
. - 2. Versetzen Sie das TwinCAT-System in den Zustand „Run“ über den Button
 .
. - 3. Loggen Sie die PLC über den Button in der Menüleiste ein
 .
. - 4. Starten Sie die PLC über den Play-Button in der Menüleiste.
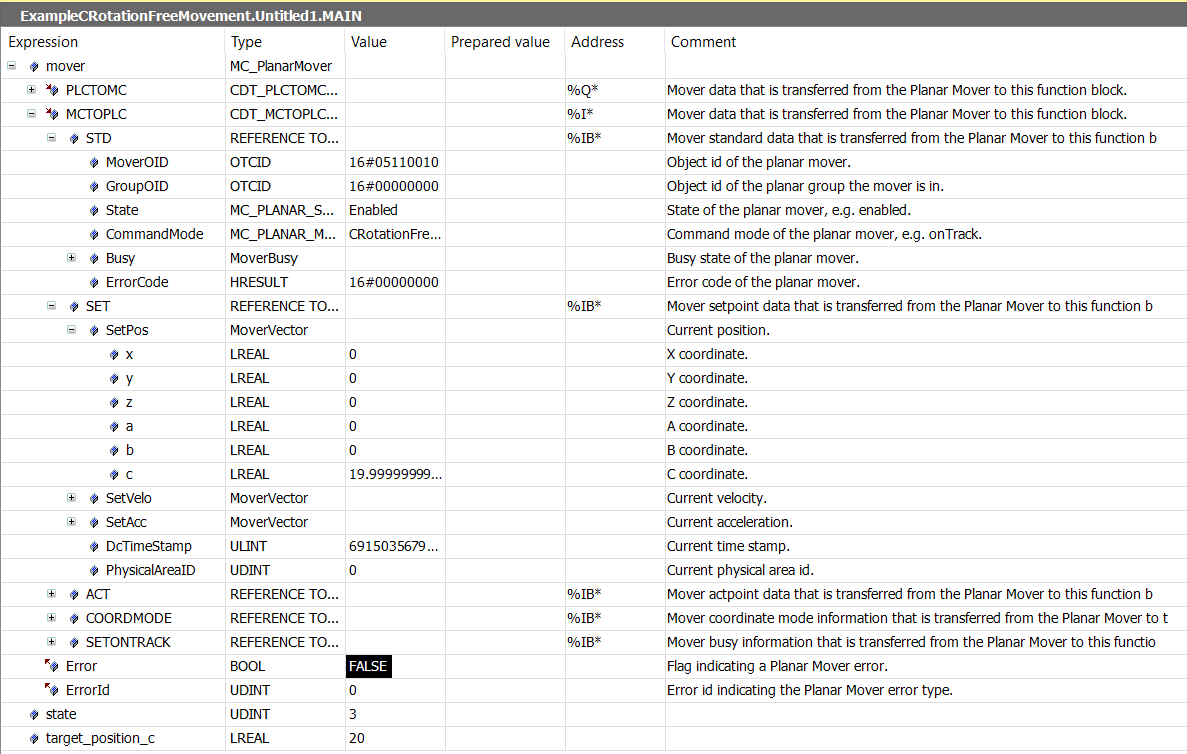
Der Mover steht am Ende des Zustandsautomaten (state=3) auf der gewünschten (verdrehten) Position und ist im Befehlsmodus CRotationFreeMovement, da der Winkel > 15° ist. Ein weiteres Verfahren der C-Achse bis z.B. 90° würde den Befehlsmodus nach Beendigung des Kommandos auf Free Movement zurück ändern.