Alle Objekte (CA-Gruppe und alle Achsen) müssen erzeugt, parametriert und verbunden werden (siehe "Konfiguration", "Parametrierung der CA-Gruppe").
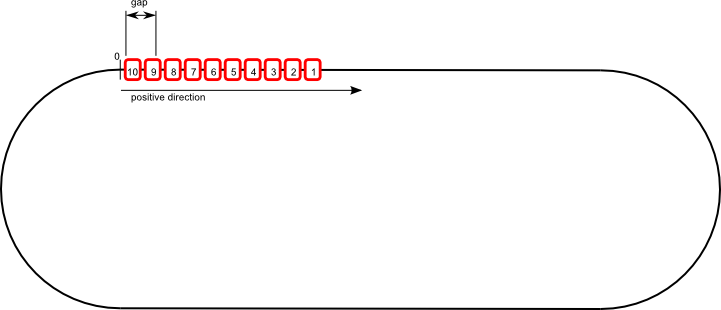
In diesem Beispiel werden die Standardwerte für alle Abstandssteuerungsparameter und 10 Achsen in der Gruppe verwendet. Alle Achsen werden auf einer geschlossenen Schiene (XTS) mit einer Länge von 3000 mm montiert. Die Position der Achsen (Mover) ist beliebig, der in der Gruppe parametrierte Standardabstand wird nicht eingehalten:
1. Alle Achsen müssen der Gruppe hinzugefügt werden (siehe Beispiele in "MC_AddAxisToGroup").
Die Reihenfolge der Achsen für die Collision Avoidance wird durch ihre Istposition auf der Schiene bestimmt.
Wenn die Positionen der Achsen gleich sind (z. B. für Simulationsachsen), ist die Reihenfolge, in der die Achsen der Gruppe hinzugefügt werden, wesentlich. In diesem Fall ist die Achse, die zuletzt hinzugefügt wurde, die erste Achse in der Gruppe.
Die "IdentInGroup" hat für die bei der Collision Avoidance verwendete Reihenfolge keine Bedeutung.
Die Position der Achsen (Mover) hat sich nicht geändert, der Abstand wird nach wie vor nicht eingehalten.
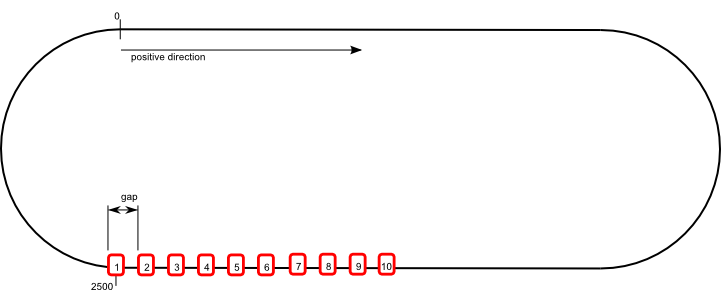
3. Geben Sie "MC_MoveAbsoluteCA" für alle Achsen (Mover) in dieselbe Position (2500 mm) aus.
Der erste Mover, d. h. der Mover mit der größten absoluten Position, hier Mover 1, erreicht die Zielposition bei 2500 mm. Die anderen Mover reihen sich auf, wobei jeder den Abstand zu seinem Vorgänger einhält. Der Vorgänger des ersten Movers ist der Letzte (da der Gruppenparameter Rail Is Ring auf TRUE gesetzt ist).