Modus DRYRUN und Allpass-Filter
Ab Version V3.1.3132.0 kann zur Unterstützung bei der Inbetriebnahme der Funktionalität „Improved Position Control“ der Modus DRYRUN in P-AXIS-00758 aktiviert werden. In diesem Modus wird die Ausgabe der resultierenden additiven Geschwindigkeit zum Antrieb unterdrückt.
Die Verwendung des Modus Dry Run ist insbesondere als erster Schritt der Parametrierung sinnvoll, um die Amplitude und Phasenlage der berechneten additiven Geschwindigkeit mit der unverfälschten Istgeschwindigkeit des Antriebs zu vergleichen und entsprechend anzupassen.
Im folgenden Beispiel wird die Parametrierung, sowie das resultierende Verhalten des Allpass-Filters aufgezeigt.
Gefiltert werden soll eine simulierte Schwingung des Antriebs von 20Hz. Im ersten Schritt wird im DRYRUN-Modus der Bandpassfilter aktiviert und das ausgegeben Signal der Improved Position Control (Grün) mit der Istgeschwindigkeit des Antriebs (Rot) verglichen.
Für die Darstellung der beiden Größen bieten sich folgende CNC-Objekte an:
- ipc_output_velocity: Output Improved Position Control (Grün)
- dig_act_vel: Istgeschwindigkeit des Antriebs (Rot)
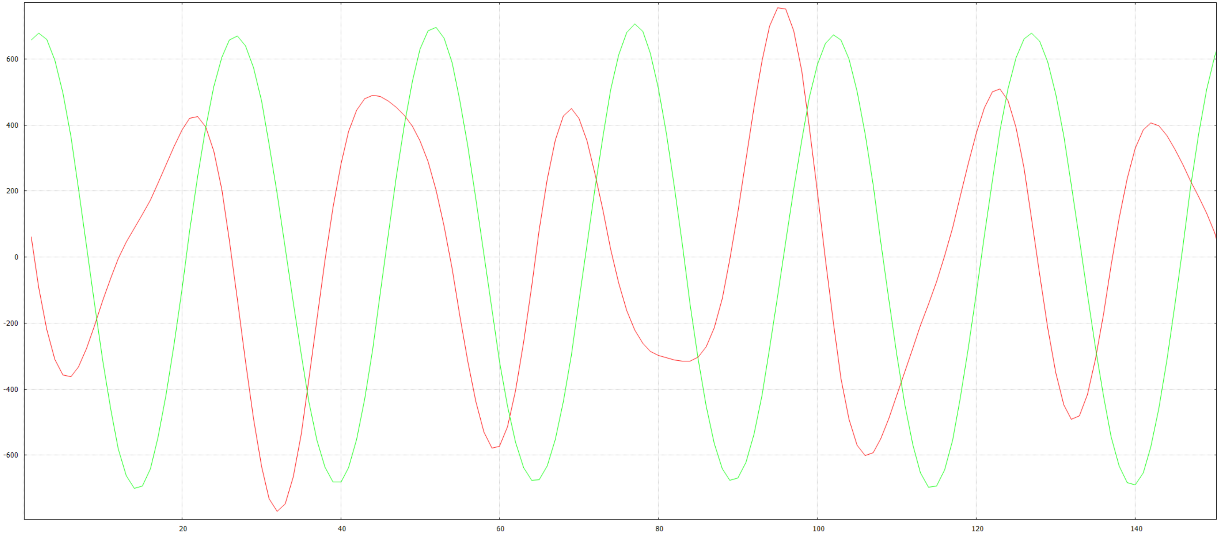
In der Scopedarstellung ist zu erkennen, dass zwar die Amplitude der ausgegebenen additiven Geschwindigkeit relativ gut zur Amplitude der Antriebsschwingung passt, die Phasenlage jedoch dazu führt, dass an einigen Stellen die Frequenz des Antriebs sogar angeregt wird. Der Phasenunterschied liegt bei ca. 90°.
Als zweiter Schritt wird nun ein Allpass-Filter der Ordnung 1 aktiviert und erneut im DRYRUN-Modus das Ergebnis untersucht:
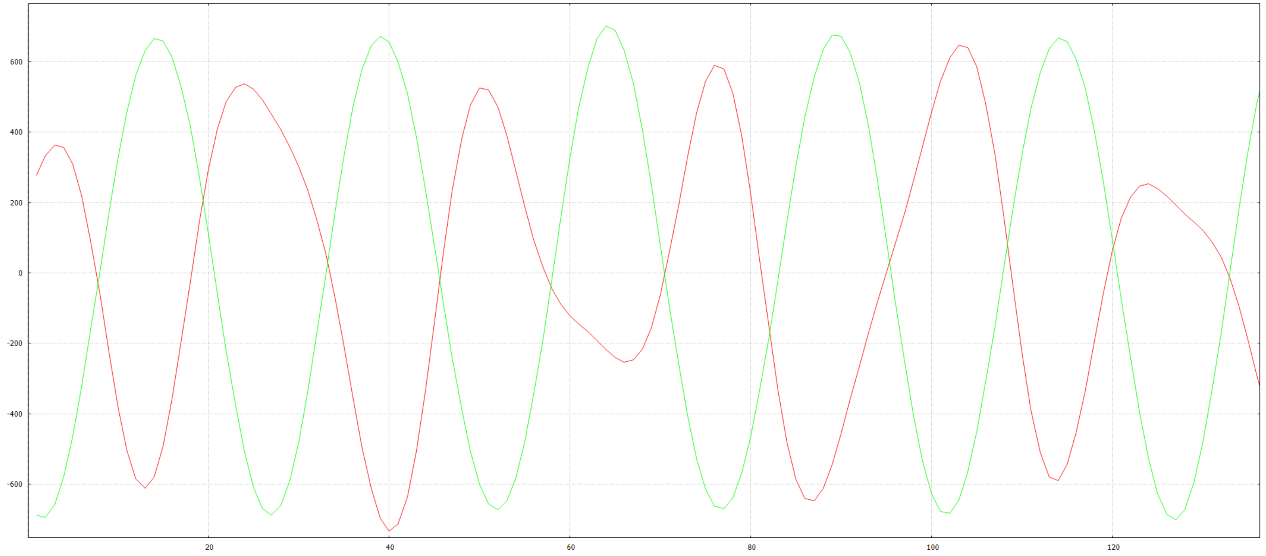
Ohne die Amplitude der additiven Geschwindigkeit zu beeinflussen, konnte mit dem Allpassfilter die Phasenlage dahingehend angepasst werden, dass diese nun nahezu perfekt invers zur Schwingung des Antriebs liegt. Dadurch kann das Ergebnis der Dämpfung verbessert werden.
Als letzter Schritt erfolgt nun die Aktivierung der Funktionalität „Improved Position Control“, sowie der Feinabstimmung der Filter und Verstärkungsfaktoren.