3D-Delta T Type 3 (P_3C3)
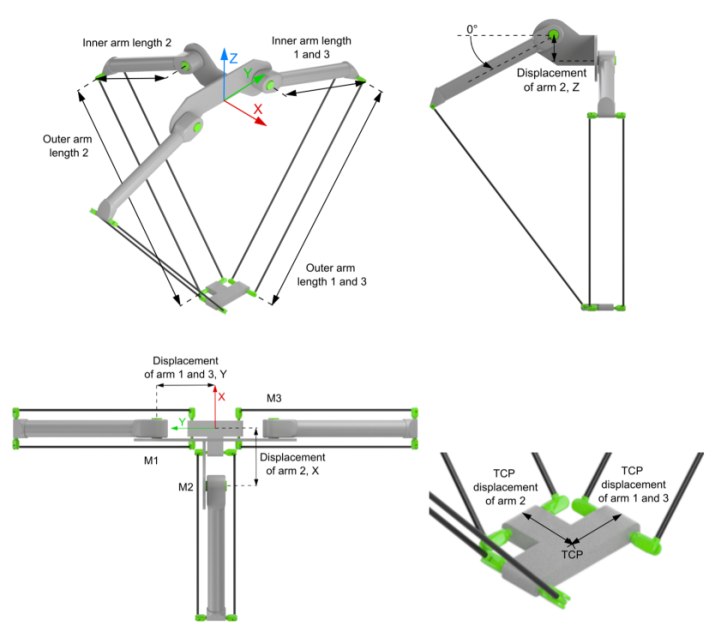
Der 3D-Delta T Type 3 (P_3C3) ist, wie oben im Schema gezeigt, aufgebaut. Zwei Arme sind direkt gegenüberliegend, der dritte Arm im 90 Grad Winkel zu diesen. Durch die Armanordnung ist es möglich, zwei Roboter dieses Typs sehr nah aneinander zu platzieren.
Das Maschinenkoordinatensystem (MCS) befindet sich mittig zwischen den beiden gegenüberliegenden Armen auf Höhe der Motoren M1 und M3.
Alle Motorachsen sind in Grad skaliert und 0° ist, wie im Schema gezeigt, definiert, wobei der Pfeil die positive Drehrichtung anzeigt. Das gilt für alle drei Motoren.
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Inner arm length 1 and 3 | Arm 1, Arm 3: Länge von Drehpunkt zu Drehpunkt des inneren Arms (direkt mit dem Motor verbunden) |
| mm |
Inner arm length 2 | Arm 2: Länge von Drehpunkt zu Drehpunkt des inneren Arms (direkt mit dem Motor verbunden) |
| mm |
Outer arm length 1 and 3 | Arm 1, Arm 3: Länge von Drehpunkt zu Drehpunkt des äußeren Arms |
| mm |
Outer arm length 2 | Arm 2: Länge von Drehpunkt zu Drehpunkt des äußeren Arms |
| mm |
Displacement of arm 1 and 3, Y | Arm 1, Arm 3: Jeweils der Abstand vom MCS-Ursprung zur Motorachse |
| mm |
Displacement of arm 2, X | Arm 2: Der Abstand vom MCS-Ursprung zur Motorachse |
| mm |
Displacement of arm 2, Z | Arm 2: Der Abstand vom MCS-Ursprung zur Motorachse |
| mm |
TCP displacement of arm 1 and 3 | Arm 1, Arm 3: Länge vom Mittelpunkt der Greiferplatte bis zu den virtuellen Drehachsen des äußeren Arms |
| mm |
TCP displacement of arm 2 | Arm 2: Länge vom Mittelpunkt der Greiferplatte bis zu der virtuellen Drehachse des äußeren Arms |
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung Installationspaket | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4024.7 TF5400 TwinCAT 3 Advanced Motion Pack V3.1.10.30 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |