3D-Kinematics Type 7 (PXX_SZ)
Die 3D-Kinematik Type 7 (PXX SZ) ist, wie oben im Schema gezeigt, aufgebaut.
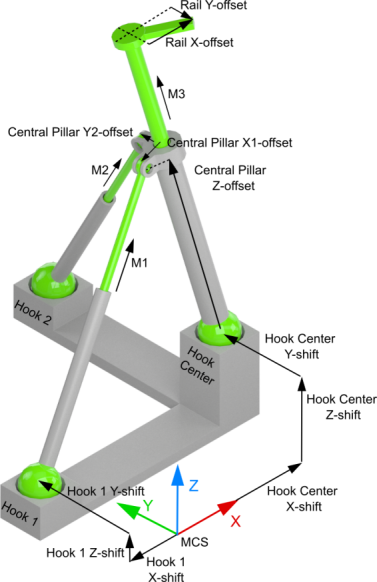
Der Nullpunkt des Maschinenkoordinatensystems (MCS) kann dabei an einer beliebigen Stelle im Raum liegen. Vom MCS-Ursprung aus werden die Aufhängungspunkte („Hooks“) der drei Arme definiert. Zur Definition der offsets wird beim zentralen Arm („Central Pillar“) von der Position parallel zur Z-Achse des MCS ausgegangen, sodass die feste Länge des zentralen Arms bis zur Aufhängung der beiden anderen Arme das „Central Pillar Z-offset“ ist. Am Ende des zentralen Arms, kann sich noch ein Ausleger („Rail“) befinden, dessen Spitze durch das „Rail-offset“ angegeben wird.
Alle Motorachsen sind in Millimetern skaliert, wobei der Pfeil die positive Richtung anzeigt. Der Nullpunkt der Motorachsen M1 und M2 befindet sich im jeweiligen Aufhängungspunkt Hook1 bzw. Hook 2. Der Nullpunkt der Motorachse M3 befindet sich hingegen im Central Pillar Z-offset.
Parameters Joint Hooks
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Hook 1 | Aufhängungspunkt des ersten Arms |
|
|
X-shift | X-Position des Hook 1 in Relation zum MCS |
| mm |
Y-shift | Y-Position des Hook 1 in Relation zum MCS |
| mm |
Z-shift | Z-Position des Hook 1 in Relation zum MCS |
| mm |
Hook 2 | Aufhängungspunkt des zweiten Arms |
|
|
X-shift | X-Position des Hook 2 in Relation zum MCS |
| mm |
Y-shift | Y-Position des Hook 2 in Relation zum MCS |
| mm |
Z-shift | Z-Position des Hook 2 in Relation zum MCS |
| mm |
Hook Center | Aufhängungspunkt des zentralen Arms |
|
|
X-shift | X-Position des Hook Center in Relation zum MCS |
| mm |
Y-shift | Y-Position des Hook Center in Relation zum MCS |
| mm |
Z-shift | Z-Position des Hook Center in Relation zum MCS |
| mm |
Parameters Central Pillar
Die Parameter zum zentralen Arm (central pillar) inkl. des Auslegers (rail) werden im Bezug zur Armposition parallel zur Z-Achse angegeben.
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
X1-offset | Abstand des Aufhängungspunktes des ersten Seitenarms zum zentralen Arm in X-Richtung |
| mm |
X2-offset | Abstand des Aufhängungspunktes des zweiten Seitenarms zum zentralen Arm in X-Richtung |
| mm |
Y1-offset | Abstand des Aufhängungspunktes des ersten Seitenarms zum zentralen Arm in Y-Richtung |
| mm |
Y2-offset | Abstand des Aufhängungspunktes des zweiten Seitenarms zum zentralen Arm in Y-Richtung |
| mm |
Z-offset | Abstand vom Aufhängungspunkt des zentralen Arms bis zur Verbindung der Seitenarme an den zentralen Arm |
| mm |
Rail offset |
| ||
X-rail offset | Abstand vom Mittelpunkt der Spitze des zentralen Arms bis zur Spitze des Auslegers in X-Richtung |
| mm |
Y-rail offset | Abstand vom Mittelpunkt der Spitze des zentralen Arms bis zur Spitze des Auslegers in Y-Richtung |
| mm |
Z-rail offset | Abstand vom Mittelpunkt der Spitze des zentralen Arms bis zur Spitze des Auslegers in Z-Richtung |
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung Installationspaket | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4024.7 TF5400 TwinCAT 3 Advanced Motion Pack V3.1.10.30 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |