5D-Kinematics Type 2 (XYZab)
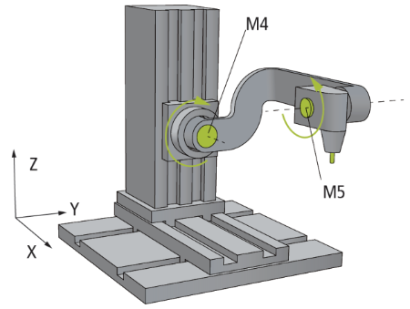
Die 5D-Kinematics Type 2 (XYZab) ist, wie oben im Schema gezeigt, aufgebaut.
Die Motoren 1 bis 3 (X, Y, Z) sind in Millimetern skaliert. Die Motoren 4 und 5 sind in Grad skaliert. Die 0° Position ist die in der Zeichnung dargestellte Achsenposition; die Pfeile zeigen die positive Drehrichtung an.
 | Unterschied von Typ 2 Die 5D-Kinematics Typ 2 unterscheiden sich von den 5D-Kinematics Typ 3 in der Orientierung der positiven Richtung der Achsrotation um die Motorachsen M4 und M5. |
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
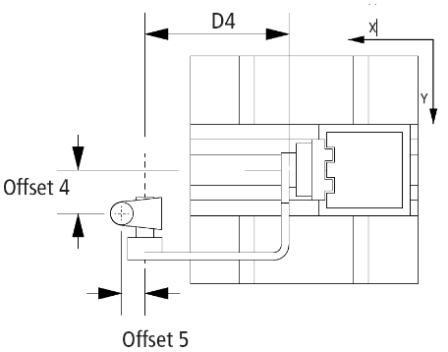
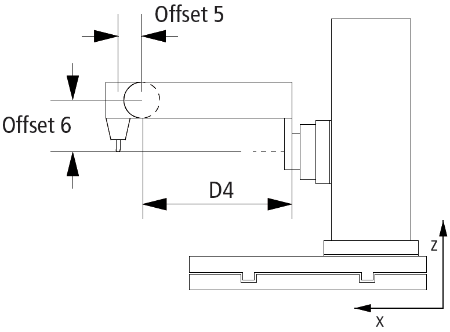
Handle D4 | Armlänge in X-Richtung von Motorachse 4 zur Motorachse 5, wie in der Zeichnung dargestellt. |
| mm |
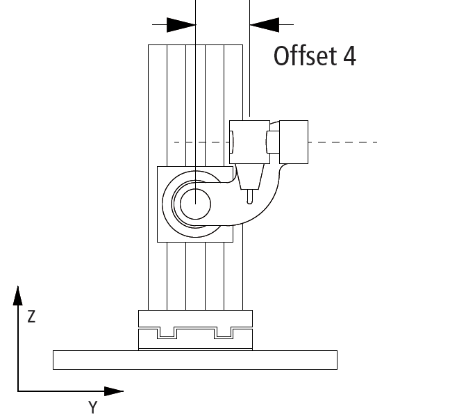
Offset 4 | Versatz in Y-Richtung zwischen Motorachse 4 und TCP. |
| mm |
Offset 5 | Versatz in X-Richtung zwischen Motorachse 5 und TCP. |
| mm |
Offset 6 | Versatz in Z-Richtung zwischen Motorachse 4 und Motorachse 5. |
| mm |
Tool offset OID | Objekt-ID eines am Kinematikflansch befestigten Werkzeugs. Das Flanschkoordinatensystem ist um 180° um die X-Achse gedreht, so dass die Z-Achse des Flanschkoordinatensystems nach unten zeigt. |
|
|
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5113 TwinCAT 3 Kinematic Transformation (Level 4) |
| TF5113 | TwinCAT Kinematic Transformation L4 TF5113 | TwinCAT 3 Kinematic Transformation L4 unterliegt rechtlichen Beschränkungen und ist nicht im Workload TF5400.AdvancedMotionPack bzw. im TF5400 TwinCAT Advanced Motion Pack Setup von der Webseite enthalten. Bei Bedarf wenden Sie sich bitte an Ihren Vertriebskontakt. |