2D-Kinematics Type 5 (S_CC)
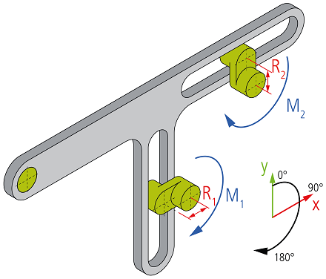
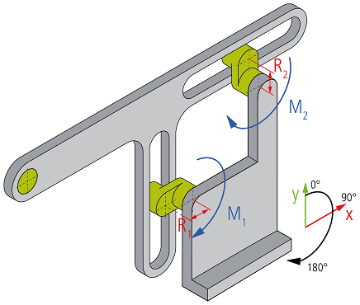
Eine Kurbel besteht aus einem Rad mit einem exzentrisch angeordnetem Knopf. Zwei Kurbeln, deren Ende in Führungsschienen münden, ermöglichen zweidimensionale Bewegungen des TCP. Die Kurbeln werden von Motoren bewegt, die ortsfest in einem Sockel verbaut sind.
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Radius R1 |
|
| mm |
Radius R2 |
|
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |