3D-Kinematics Type 8 (S_CCC)
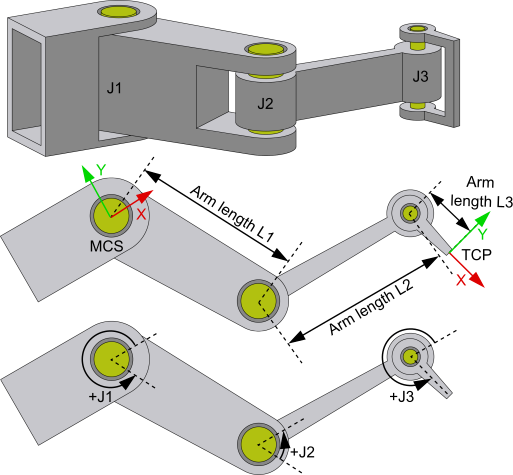
Die 3D-Kinematics Type 8 (S_CCC) beschreibt eine serielle kinematische Transformation, die, wie oben im Schema gezeigt, aufgebaut ist.
Alle Gelenke sind in Grad skaliert, wobei die positive Drehrichtung in Pfeilrichtung ist. Der Ursprung des Maschinenkoordinatensystems (MCS) befindet sich im Gelenk J1.
 | Singuläre Positionen Singuläre Positionen können im kartesischen Modus nicht angefahren werden. Ein Anfahren dieser Positionen ist nur im Achs-Modus (Direct Mode) möglich. |
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Arm length L1 | Abstand zwischen den Gelenken J1 und J2 |
| mm |
Arm length L2 | Abstand zwischen den Gelenken J2 und J3 |
| mm |
Arm length L3 | Abstand zwischen dem Gelenken J3 und dem Flansch |
| mm |
Parameter für eine Gelenkkopplung
Befinden sich zwischen der physikalischen Position eines Motors und dem dazugehörigen Gelenk weitere Motoren, so liegt eine Kopplung zwischen diesen vor. Der jeweilige Koppelfaktor ist zu parametrieren.
Parameter | Beschreibung | Typ |
|---|---|---|
Gear coupling 1 to 2 | Der Parameter beschreibt den Einfluss des Motors M1 auf das Gelenk J2. |
|
Gear coupling 1 to 3 | Der Parameter beschreibt den Einfluss des Motors M1 auf das Gelenk J3. |
|
Gear coupling 2 to 3 | Der Parameter beschreibt den Einfluss des Motors M2 auf das Gelenk J3. |
|
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Installationspaket | Zielplattform | TwinCAT Funktion |
|---|---|---|
TF5400 TwinCAT 3 Advanced Motion Pack V3.3.57 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |