3D-Tripod Type 2 (P_3L)
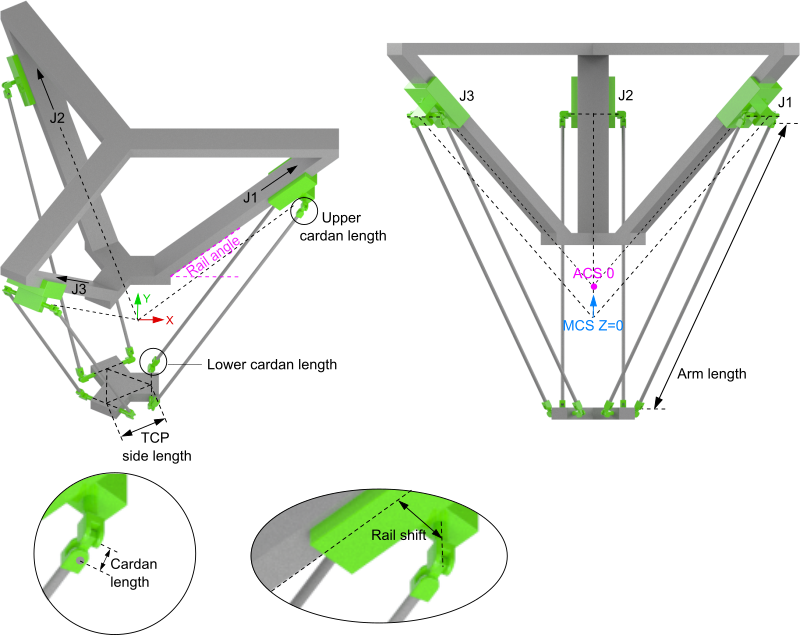
Der 3D-Tripod Type 2 (P_3L) ist, wie oben im Schema gezeigt, aufgebaut.
Alle linear Achsen (ACS) sind in Millimeter (mm) skaliert. Die 0-Position der Achsen ist nur ein „virtueller“ Punkt, welcher nicht angefahren werden kann. Eine positive Geschwindigkeit der Motoren bewegt das Tool aufwärts, sodass die linearen Achsen keine negative Position erreichen können.
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Arm length | Armlänge von Drehpunkt zu Drehpunkt |
| mm |
Rail angle | Winkel, in dem die Führungsschienen der Linearmotoren angebracht sind. |
| ° |
Rail shift | Versatz der Armaufhängungspunkte zu den Führungsschienen der Linearmotoren. |
| mm |
Upper cardan length | Wird an den oberen Armaufhängungspunkten ein Kardan-Gelenk verwendet, so kann über diesen Parameter der Versatz der beiden Gelenke innerhalb des Kardan-Gelenks angegeben werden. Bei Verwendung eines Kugelgelenkes ist die Länge 0 einzutragen. |
| mm |
Lower cardan length | Wird an den unteren Armaufhängungspunkten ein Kardan-Gelenk verwendet, so kann über diesen Parameter der Versatz der beiden Gelenke innerhalb des Kardan-Gelenks angegeben werden. Bei Verwendung eines Kugelgelenkes ist die Länge 0 einzutragen. |
| mm |
TCP side length | Seitenlänge des virtuellen Dreiecks im TCP. |
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4024.24 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |