4D-Cable Kinematics (P_4L)
Die 4D-Cable Kinematics (P_4L) ist, wie oben im Schema gezeigt, aufgebaut.
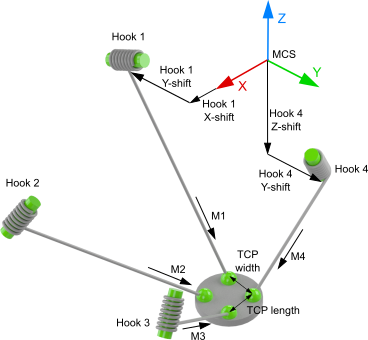
Der Nullpunkt des Maschinenkoordinatensystems (MCS) kann dabei an einer beliebigen Stelle im Raum liegen. Von MCS-Ursprung aus werden die Aufhängungspunkte („Hooks“) der Kabel/Seile definiert.
Alle Motorachsen sind in Millimetern skaliert, wobei der Pfeil die positive Richtung anzeigt.
Parameter für Joint Hooks
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Hook 1 | Aufhängungspunkt des ersten Kabels |
|
|
X-shift | X-Position des Hook 1 in Relation zum MCS |
| mm |
Y-shift | Y-Position des Hook 1 in Relation zum MCS |
| mm |
Z-shift | Z-Position des Hook 1 in Relation zum MCS |
| mm |
Hook 2 | Aufhängungspunkt des zweiten Kabels |
|
|
X-shift | X-Position des Hook 2 in Relation zum MCS |
| mm |
Y-shift | Y-Position des Hook 2 in Relation zum MCS |
| mm |
Z-shift | Z-Position des Hook 2 in Relation zum MCS |
| mm |
Hook 3 | Aufhängungspunkt des dritten Kabels |
|
|
X-shift | X-Position des Hook 3 in Relation zum MCS |
| mm |
Y-shift | Y-Position des Hook 3 in Relation zum MCS |
| mm |
Z-shift | Z-Position des Hook 3 in Relation zum MCS |
| mm |
Hook 4 | Aufhängungspunkt des vierten Kabels |
|
|
X-shift | X-Position des Hook 4 in Relation zum MCS |
| mm |
Y-shift | Y-Position des Hook 4 in Relation zum MCS |
| mm |
Z-shift | Z-Position des Hook 4 in Relation zum MCS |
| mm |
TCP | Tool Center Point |
|
|
TCP length | Abstand der Aufhängungspunkte am TCP entlang der X-Achse |
| mm |
TCP width | Abstand der Aufhängungspunkte am TCP entlang der Y-Achse |
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung Installationspaket | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4024.7 TF5400 TwinCAT 3 Advanced Motion Pack V3.1.10.30 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |