Karteireiter "DXD"
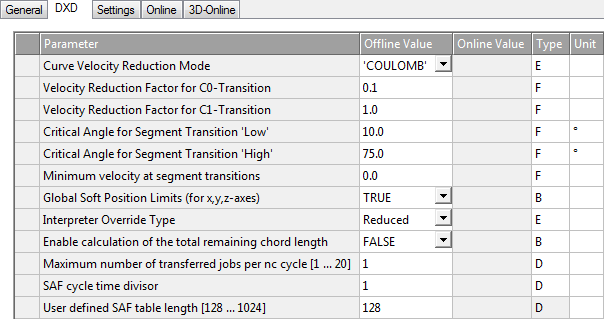
Auf der Eigenschaftsseite „DXD“ werden die NCI-Gruppenparameter beschrieben.
Kurvengeschwindigkeitsreduktionsmethode
Die Kurvengeschwindigkeitsreduktionsmethode wirkt ausschließlich für C0-Übergänge (Siehe Klassifikation der Segmentübergänge).
Defines der Kurvengeschwindigkeitsreduktionsmethoden
0 Coulomb
1 Cosinus
2 VeloJump
3 DeviationAngle (not yet released) Methode | Beschreibung |
|---|---|
Coulomb | Die Coulomb-Reduktionsmethode ist ein dynamisches Verfahren in Analogie zur Coulombstreuung. |
Cosinus | Die Cosinus-Reduktionsmethode ist ein rein geometrisches Verfahren.
Reduktionsschema:
Wollen Sie (bis auf φ = 0) vollständig reduzieren, dann setzen Sie C0 = 0.0, φlow=0 und φhigh sehr klein aber ungleich 0 (z.B. 1.0E-10) |
VeloJump | Hierbei handelt es sich um ein geometrisches Verfahren zur Bestimmung der Segmentübergangsgeschwindigkeit bei einem C0-Übergang. Bei diesem Verfahren wird die Bahngeschwindigkeit ggf. so reduziert, dass der auftretende Geschwindigkeitssprung nicht grösser wird, als max. erlaubt. Dieser berechnet sich nach der Formel: VeloJump-Faktor * Zykluszeit * min(Beschleunigung; Verzögerung). Weitere Information |
Geschwindigkeitsreduktionsfaktor C0-Übergang
Reduktionsfaktor für C0-Übergänge. Die Wirkungsweise ist von der Reduktionsmethode abhängig.
C0 ∈ [0.0, 1]
Geschwindigkeitsreduktionsfaktor C1-Übergang
Zuerst wirdV_link gleich dem Minimum der beiden Segmentsollgeschwindigkeiten gesetzt:
V_link = min(V_in,V_out).
In Abhängigkeit von den Geometrietypen G_in und G_out auf den zu verbindenden Segmenten und den Ebenenanwahlen auf G_in und G_out wird der geometrisch induzierte absolute Beschleunigungssprung AccJump im Segentübergang unter der Geschwindigkeit V_link berechnet.
Ist dieser größer als C1 mal der für die Geometrien und Ebenen zulässigen Bahn-Beschleunigung /(absolute)Verzögerung AccPathReduced, dann wird die Geschwindigkeit V_link so reduziert, dass der sich ergebende Beschleunigungssprung gleich AccPathReduced ist.
Ist dieser Wert kleiner als V_min, dann hat V_min Priorität.
Reduktionsfaktor für C1-Übergänge: C1 ≥ 0.0
Kritischer Winkel Segementübergang 'Low'
Paramter für φlow (Siehe: Kurvengeschwindigkeitsreduktionsmethode).
Kritischer Winkel Segementübergang 'High'
Paramter für φhigh (Siehe: Kurvengeschwindigkeitsreduktionsmethode).
Mindestgeschwindigkeit an Segmentübergängen
Jede NCI-Gruppe hat eine Mindestbahngeschwindigkeit V_min≥ 0.0 die niemals unterschritten werden sollte. Vom Benutzer vorgegebene Ausnahmen sind: programmierter Halt am Segmentübergang, Bahnende und Override-Anforderungen die unter die Mindestgeschwindigkeit führen. Systembedingte Ausnahme ist eine Bewegungsumkehr.
Bei der Reduktionsmethode DEVIATIONANGLE gilt für den Ablenkungswinkel φ ≥ φ_h, dann wird die Mindestgeschwindigkeit nicht beachtet. V_min muss kleiner als die Bahnsollgeschwindigkeit (F-Wort) jedes Segments sein.
Die Mindestgeschwindigkeit kann jederzeit im NC-Programm auf einen neuen Wert V_min≥ 0.0 in Einheiten mm/sec gesetzt werden.
Global Soft Position Limits (für x,y,z-Achsen)
Parameter zum Einschalten der Software-Endlagen der Bahn (Siehe: Parametrierung).
Interpreter Override Typ
Parameter zur Auswahl des Overridetyps der Bahn (Siehe Bahnoverride (Interpreter-Overridetypen)).
Enable calculation of the total remaining chord length
Aktiviert die Berechnung der verbleibenden Pfadlänge. Wenn die Berechnung der verbleibenden Pfadlänge aktiviert worden ist, dann kann sie anschließend per ADS ausgelesen werden. Siehe auch im Anhang: Anzeige der verbleibenden Bahnlänge.
Maximum number of transferred jobs per nc cycle [1 … 20]
Maximale Anzahl von zu übertragenden Kommandos pro NC Zyklus. Mit diesem Parameter ist es möglich, dass die SVB Task weiterhin langsamer läuft als die SAF Task und dennoch ausreichend viele Jobs übergeben werden, so dass die SAF-Tabelle mit Jobs nicht leer läuft.
SAF cycle time divisor
Die Zykluszeituntersetzung sorgt dafür, dass die Sollwertberechnung in der SAF nicht mit der SAF-Zykluszeit, sondern mit einer durch den hier angegebenen Wert dividierten Zeit berechnet wird. Beim Verfahren mit sehr großer Dynamik kann es sinnvoll sein, den Parameter auf einen Wert größer 1 zu setzen um Diskretisierungsungenauigkeiten zu minimieren. Die Erhöhung des SAF cycle time divisor führt dazu, dass der Sollwertgenerator intern häufiger aufgerufen wird.
User defined SAF table length
Parameter, der die Größe der SAF-Tabelle und somit die maximale Anzahl der gepufferten SAF-Einträge (Look-Ahead) definiert. Werden in einem NC-Programm viele sehr kurze Segmente nacheinander verfahren, so kann durch Vergrößerung dieses Wertes eine ungewollte Geschwindigkeitsreduktion am Segmentübergang vermieden werden.