Prozessabbild
Über das Prozessabbild (zyklisches Interface) einer Achse wird diese mit unterschiedlichen Antriebskomponenten verbunden. Im einfachsten Fall wird ein Link von der Achse zu einem Antrieb hergestellt und notwendige Verknüpfungen der Prozessabbilder werden automatisch durchgeführt. Im Einzelfall, insbesondere wenn in das System unbekannte Hardwarekomponenten eingebunden werden, müssen solche Verknüpfungen von Hand hergestellt werden.
Encoder-Prozessabbild einer Achse
Über das Encoder-Prozessabbild (zyklischer Datenaustausch) werden unterschiedliche Geber-Hardware bzw. entsprechende Busklemmen zur Positionserfassung einer Achse angebunden. Soweit diese Hardware direkt vom System unterstützt wird, ist keine manuelle Konfiguration einzelner Variablen notwendig.
Abhängig vom Encoder/Antrieb können die NC-Variablen als signed oder unsigned interpretiert werden. Zudem können die nDataIn-Variablen mit 2 oder 4 Byte Referenzen verknüpften werden. (Im hier nicht behandelten Sonderfall auch mit 8 Byte Referenzen.)
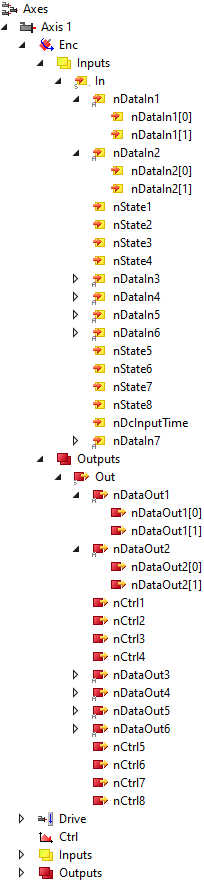
Eingangsdaten des Encoder-Prozessabbildes einer Achse
NC-In-Variable | Datentyp | Beschreibung |
|---|---|---|
bzw.
|
bzw.
| Aktuelle Istposition des Encoders bzw. des Drives in Inkrementen. Die Anzahl der zulässigen Inkremente wird im Encoder Parameter Encoder Mask (maximum encoder value) definiert. Der Inkrementalwert wird durch die NC aufbereitet und mathematisch zur Istposition in physikalischen Einheiten, wie z. B. mm oder Grad, verarbeitet. Überläufe des Inkrementalwertes werden durch die NC mitgezählt. Das System macht üblicherweise keinen Unterschied zwischen Inkremental- und Absolutgebern, siehe Encoder-Parameter Referenzsystem. Verbunden (Mapping) mit:
|
bzw.
|
bzw.
| Optionale Latch-Istposition des Encoders bzw. des Drives in Inkrementen. Der Inkrementalwert wird durch die NC aufbereitet und mathematisch zur Istposition in physikalischen Einheiten, wie z. B. mm oder Grad, verarbeitet. (Siehe Funktionsbaustein MC_TouchProbe.) Verbunden (Mapping) mit:
|
|
| Optionale Statusinformationen Zum Beispiel Teilnehmer im Datenaustausch, Encoder Fehler, Kommunikation zum Positions-Latch oder Registerkommunikation. Verbunden (Mapping) mit:
|
|
| Zusätzliche optionale Statusinformationen Zum Beispiel Kommunikation zum Positions-Latch, Kommunikation Encoder-Reset, Kommunikation zum Lesen einer Absolut-Position Verbunden (Mapping) mit:
|
|
| reserviert |
|
| Optionaler feldbusabhängiger IO-Status wie WcState (Working Counter) bei EtherCAT oder CdlState bei Beckhoff Lightbus. Bedeutung: |
|
bzw.
| Verbunden (Mapping) mit:
|
|
bzw.
| Verbunden (Mapping) mit:
|
|
bzw.
| Verbunden (Mapping) mit:
|
|
bzw.
| Verbunden (Mapping) mit:
|
|
| Verbunden (Mapping) mit:
|
|
| Verbunden (Mapping) mit:
|
|
| Verbunden (Mapping) mit:
|
nState8 |
| Verbunden (Mapping) mit:
|
|
| Optional: Wird für die NC-Totzeitkompensation des Encoders verwendet. |
|
bzw.
| Antriebs-Ist-Geschwindigkeit vom Antriebsgerät bzw. vom Encoder/Feedback. Verbunden (Mapping) mit:
|
Ausgangsdaten des Encoder-Prozessabbildes einer Achse
I/O-Variable | Datentyp | Beschreibung |
|---|---|---|
|
bzw.
| Aktuelle Istposition des Encoders bzw. des Drives in Inkrementen, die die NC direkt von der Eingangsvariable |
|
bzw.
| Verbunden (Mapping) mit:
|
|
| Optionale Control-Informationen Zum Beispiel Kommunikation zum Positions-Latch, Kommunikation Encoder Reset, Registerkommunikation Verbunden (Mapping) mit:
|
|
| Zusätzliche optionale Control-Informationen Zum Beispiel Kommunikation zum Positions-Latch, Kommunikation Encoder-Reset, Kommunikation zum Lesen einer Absolut-Position Verbunden (Mapping) mit:
|
|
| reserviert |
|
| reserviert |
|
bzw.
| reserviert |
|
bzw.
| reserviert |
|
bzw.
| reserviert |
|
bzw.
| reserviert |
|
| Verbunden (Mapping) mit:
|
|
| Verbunden (Mapping) mit:
|
|
| reserviert |
|
| reserviert |