Resonanzen
Die meisten mechanischen Antriebssysteme sind mechanisch inhomogen aufgebaut.
Dies kann beispielsweise ein Antrieb mit Riemen sein, bei dem der Riemen eine andere Festigkeit und Elastizität aufweist als weitere aus Metall bestehende Antriebsachsen.
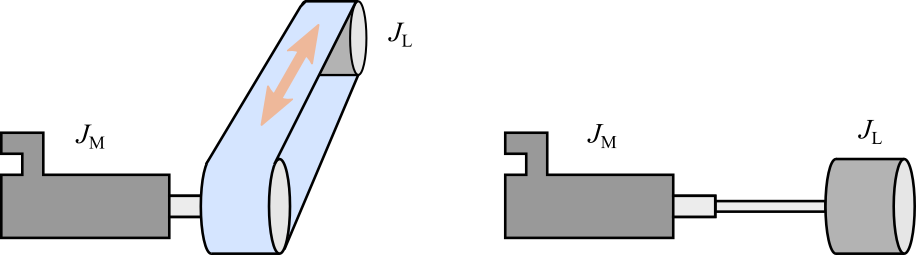
Aber auch Antriebsachsen des gleichen Materials besitzen abhängig von ihrer Materialstärke unterschiedliche Festigkeiten.
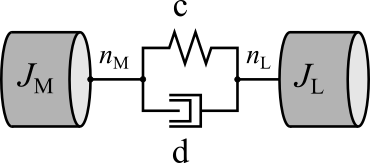
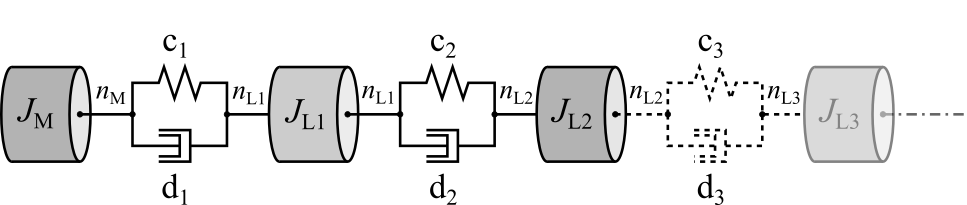
Physikalisch stellen solche Systeme Feder-Masse-Systeme mit „c“ als Federkonstante und „d“ als Dämpfungskonstante dar. Weiterhin stellt „JM“ exemplarisch das Trägheitsmoment eines Motors dar und „JL“ das Trägheitsmoment einer Last.
Weiterhin muss berücksichtigt werden, dass dem Anwender die Information über die Position und Drehzahl der Last meist nicht zur Verfügung steht, da die Rückmessung der Position üblicherweise über einen Positionssensor erfolgt, der im Motor verbaut ist. Für den Anwender ist in der Regel aber das Verhalten auf Lastseite und nicht auf Motorseite interessant.
Für die Stabilitätsbetrachtung der Antriebsregelung ist jedoch immer die Seite relevant, von der die Information als Feedback in die Regelung einfließt. Dies ist in der Regel die Motorseite.
Verhalten eines Zweimassensystems
Im Folgenden wird zum Verständnis das ideale Verhalten eines Zweimassensystems ohne überlagerte Regelung betrachtet.
Lastseite (Lastdrehzahl als Istwert bezogen auf ein Drehmoment als Sollwert):
Bezieht man die Lastdrehzahl auf ein vorgegebenes Drehmoment eines Antriebs, so ergibt sich für ein exemplarisches Zweimassensystem idealisiert der folgende Frequenzgang.
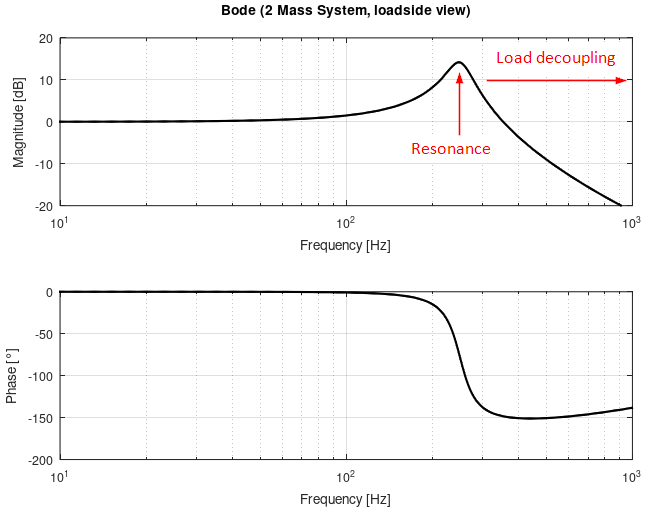
Für niedrige Frequenzen unterhalb der Resonanzfrequenz kann die Last der Bewegung des Motors folgen. Für steigende Frequenzen oberhalb der Resonanzfrequenz ist dies immer weniger der Fall. Es findet dort eine Abkopplung der Last vom Motor statt. Aus diesem Grund ist es bei der Regler Auslegung nicht sinnvoll, eine Regler Bandbreite oberhalb der Resonanzfrequenz anzustreben.
Motorseite (Motordrehzahl als Istwert bezogen auf ein Drehmoment als Sollwert):
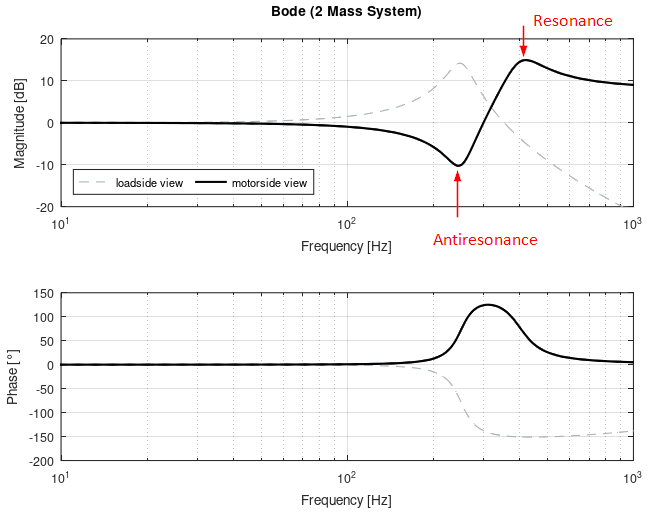
Das motorseitige Übertragungsverhalten des Zweimassensystems ist das für die Regler Auslegung ausschlaggebende Verhalten. (bei Nutzung des Positionssensors am Motor).
Es zeigt eine Antiresonanz an der Frequenz der Resonanz des lastseitigen Verhaltens. Des Weiteren zeigt es eine Resonanz, welche im Frequenzbereich über der Antiresonanz liegt.
Das Trägheitsverhältnis der Lastträgheit zur Motorträgheit ist dabei abhängig vom Abstand der Resonanzfrequenz von der Antiresonanzfrequenz.
Verhalten eines geregelten Systems mit Zweimassenmechanik
(Servoverstärker AX8000, Basiseinstellung: Drehzahlbeobachter: Aus, keine Filter)
Nachfolgend ist der Frequenzgang eines realen Systems mit überlagerter Regelung und mechanischem Zweimassenverhalten gezeigt. (Das reale mechanische System hat andere Parameter als das gezeigte ideale System und keine Verbindung zu diesem.)
Weiterhin wurden keine Filter gesetzt und der Drehzahlbeobachter ist nicht aktiv.
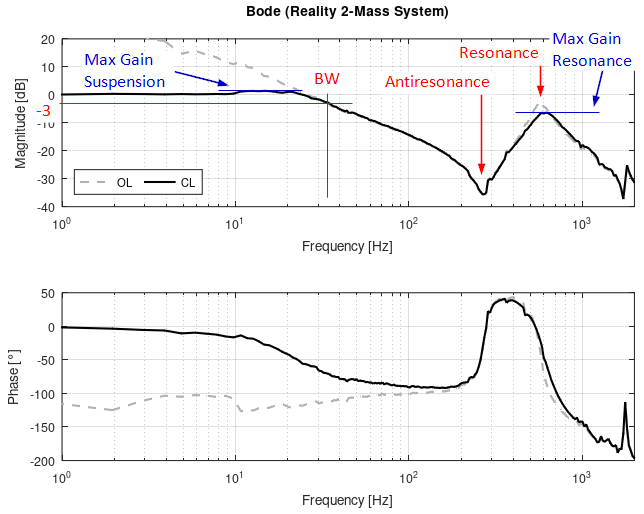
Die relevanten Stabilitätsparameter für das Tuning beziehen sich im Wesentlichen auf die Antwort des mechanischen Systems vor und hinter der führenden Resonanzstelle.
Die maximale Verstärkung vor der Resonanz (Max. Gain Suspension) kann je nach Wunsch an die Steifigkeit des Antriebs parametriert werden. Siehe Stabilitätsbedingungen.
Die Dämpfung von Frequenzkomponenten oberhalb der Regler Bandbreite (BW) erfolgt durch die Angabe der maximalen Resonanzverstärkung (Max. Gain Resonance)
In der Regel ist es erstrebenswert, dass Frequenzkomponenten oberhalb der Regler Bandbreite keinen oder nur geringen Einfluss auf das Regler Verhalten haben.
Aus diesem Grund ist es vorteilhaft diese Frequenzkomponenten ausreichend stark zu dämpfen. Häufig genutzte Werte für eine Dämpfung durch die maximale Resonanzverstärkung sind -6dB bis -3dB.
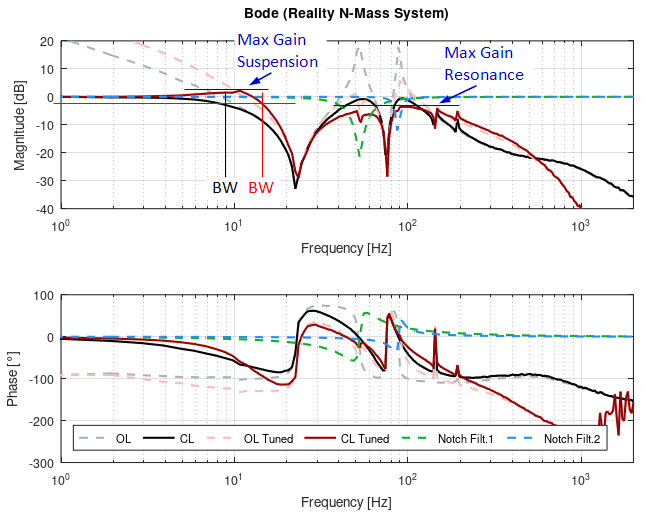
Unter Berücksichtigung der vorangegangenen Zusammenhänge ermittelt das Tuningverfahren den folgenden optimierten Frequenzgang:
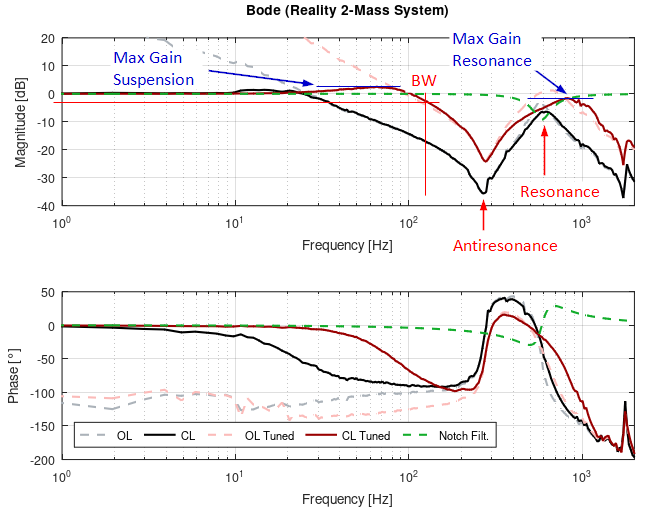
Im Gegensatz zum Ausgangsplot wurde die Bandbreite (BW) von 33 Hz auf über 100 Hz erhöht. Es wurde ein Notch Filter auf die Resonanzfrequenz gesetzt, wodurch diese aktiv gedämpft wurde. Dabei werden die Vorgaben bezüglich der maximalen Verstärkungen (Max. Gain Suspension (3dB) und Max. Gain Resonance (-3dB)) eingehalten.
Verhalten eines geregelten Systems mit Mehrmassenmechanik
In der Praxis verwendete Mechaniken haben häufig kein reines Zweimassenverhalten sondern Mehrmassenverhalten. Solche Systeme können durch eine Reihenschaltung mehrerer Zweimassensysteme modelliert werden.
Für das Reglertuning ist dabei aus praktischer Sicht die niederfrequenteste Resonanz relevant, da dort auch die niederfrequenteste Lastabkopplung stattfindet. Ein Beispiel für das Tuning eines solchen Systems zeigt der folgende Frequenzgang.