Grundlagen Bodediagramm
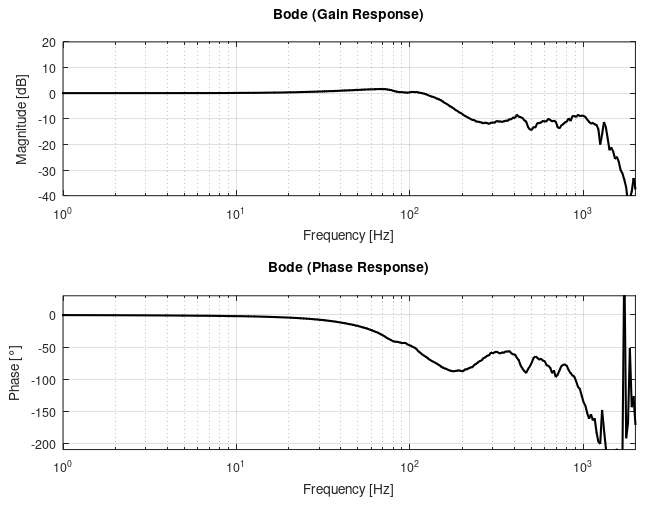
Ein Bodediagramm ist ein graphisches Werkzeug zur Darstellung der Frequenzcharakteristik eines Systems. Es besteht aus zwei Diagrammen, dem Amplitudengang und dem Phasengang.
- Amplitudengang: Gibt die Verstärkung des Systems (Verhältnis der Ausgangsamplitude zur Eingangsamplitude) in Abhängigkeit der Frequenz an.
Die Angabe der Verstärkung erfolgt in Dezibel [dB]. - Phasengang: Gibt die Phasenverschiebung des Systems (relative Verzögerung vom Eingang zu Ausgang) in Abhängigkeit der Frequenz an.
Die Angabe der Phasenverschiebung erfolgt in Grad [°].
Durch das Bodediagramm können die spezifischen Eigenschaften eines mechanischen
Antriebssystems grafisch dargestellt und ermittelt werden. Weiterhin liefert es Informationen über die Systemstabilität und die Dynamik des Systems.
Im Folgenden wird das Bodediagramm für mechanische Regelungssysteme insoweit erklärt, dass die Bedeutung der im Benutzerinterface verwendeten Größen und Parameter bezüglich Dynamik und Stabilität klar und ein grundlegendes Verständnis zum Lesen eines Bodediagramms vermittelt wird.
Zur Beschreibung der Systemeigenschaften über das Bodediagramm ist die Unterteilung des regelungstechnischen Antriebssystems in offenen und geschlossenen Regelkreis erforderlich.
 | In einer Regelung mit Kaskadenstruktur, von Innen nach Außen bestehend aus Strom,-Drehzahl und Positionsregelkreis, ist der Drehzahlregelkreis der Regelkreis, in dem die mechanischen Systemeigenschaften wirken. |
- Offener Regelkreis (Open Loop, kurz: OL)
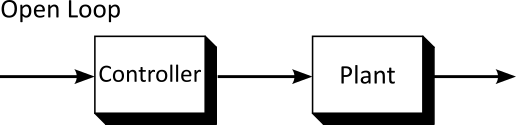
Regelkreis ohne Rückführung bestehend aus Regler, Regelstrecke (hier mechanisches System und Rückführung (Sensorik).
- Geschlossener Regelkreis (Closed Loop, kurz: CL)
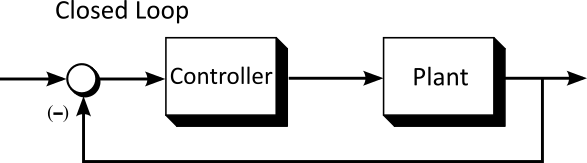
Regelkreis mit Rückführung - Betrachtung der frequenzabhängigen Verstärkung und Phasenverschiebung der realen Antriebsregelung.
- Betrachtung der dynamischen Eigenschaften des Regelsystems.
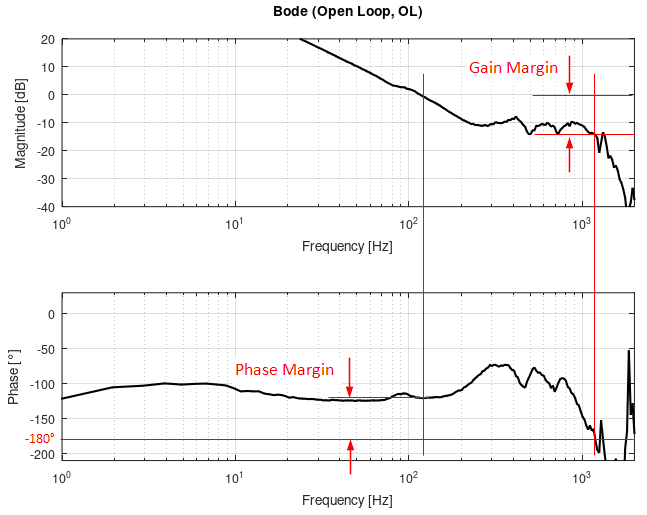
Offener Regelkreis (Stabilitätsbetrachtung)
Die Systemstabilität wird anhand der Phasenreserve und der Amplitudenreserve ermittelt.
- Phasenreserve (Phase Response, Stabilitätsbedingungen)
Abstand der Phase im Phasengang von 180°, an dem Punkt, an dem der Amplitudengang von links gesehen 0 dB unterschreitet.
Die Phasenreserve sollte in der Praxis mindestens 30° - 40° betragen. - Amplitudenreserve (Gain Response, Stabilitätsbedingungen)
Abstand der Amplitude im Amplitudengang von 0 dB, an dem Punkt, an dem der Phasengang von links gesehen 180° unterschreitet.
Die Amplitudenreserve sollte in der Praxis mindestens 6 – 8 dB betragen.
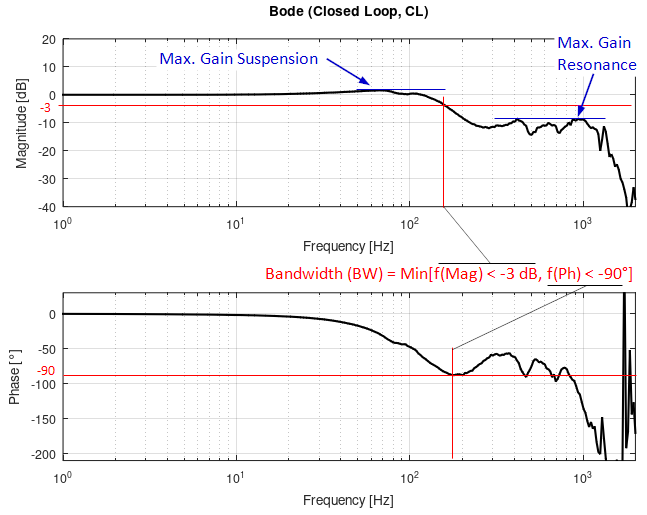
Geschlossener Regelkreis
Das Bodediagramm des geschlossenen Regelkreises zeigt die frequenzabhängigen Verstärkungen und Phasenverschiebungen in ihrer physikalischen Wirkung.
Ideal wäre ein System, für dass das Ausgangssignal für alle Frequenzen die gleiche Amplitude wie das Eingangssignal besitzt und im Verhältnis zum Eingangssignal keine Verzögerung aufweist. Ein solches System besitzt im Bodediagramm für Amplitude und Phase Werte von Null.
Praktisch gesehen ist dies aus energetischen und laufzeittechnischen Gründen in einem realen System nicht möglich. Für steigende Frequenzen wird das Ausgangssignal langfristig schwächer als das Eingangssignal und weist gegenüber dem Eingangssignal eine steigende Phasenverschiebung auf.
Weiterhin können Resonanzstellen und die Parametrierung des Reglers dazu führen, dass die Amplitude des Ausgangssignals die des Eingangssignals lokal für bestimmte Frequenzen überschreitet. In diesem Zusammenhang werden die Begriffe der Bandbreite und der maximalen Verstärkung definiert.
- Bandbreite (Bandwidth, Stabilitätsbedingungen)
Minimum der der beiden Frequenzen, an denen der Amplitudengang -3 dB von links gesehen unterschreitet und der Phasengang -90° von links gesehen unterschreitet. - Maximale Verstärkung (Max. Gain, Stabilitätsbedingungen)
Maximal zulässige Verstärkung in dB.
In der Praxis kann dies je nach Anwendung zwischen 1 dB (Soft: Faktor 1,122) und 3 dB (Stiff: Faktor 1,413) gewählt werden.
Optimierungsziele
Grundsätzlich sind für eine hohe Produktivität kurze Maschinendurchlaufzeiten erforderlich.
Diese erfordern für eine schnelle Verarbeitung bei Gewährleistung der Anforderungen an Genauigkeit und Präzision entsprechend hohe Bandbreiten der genutzten Antriebsregler.
Die Forderungen nach einer hohen Bandbreite und einer hohen Stabilität sind dabei meist gegensätzlich. Eine Erhöhung der Bandbreite führt in der Regel zu einer geringeren Stabilität und umgekehrt. Ein weiteres Optimierungsziel können Anforderungen an die Laufruhe des Antriebs sein. Für eine hohe Laufruhe sind oft moderate Regler Verstärkungen vorteilhaft.