Installation
Systemvoraussetzung
Es gelten für das Target für MATLAB®/Simulink® zunächst dieselben Anforderungen wie für TwinCAT 3 C/C++. Für eine detaillierte Beschreibung der TwinCAT 3 C/C++-Anforderungen sei auf das Handbuch TwinCAT 3 C++, Kapitel 4 „Anforderungen“, verwiesen.
Im Folgenden werden diese nur stichpunktartig und nicht in aller Ausführlichkeit aufgegriffen.
Auf dem Engineering-PC
- Microsoft Visual Studio 2010 (mit Service Pack 1), 2012, 2013, 2015 oder 2017 Professional, Premium, Ultimate oder Community Edition
- Installation unter Windows immer mit Rechtsklick run as admin…
- Für Visual Studio 2015 bei der Installation die Checkbox Visual C++ selektieren
- Für Visual Studio 2017 “Desktop development with C++” manuell auswählen
- Microsoft “Windows Driver Kit” Version 7.1.0 (nur notwendig für TwinCAT Versionen kleiner als TwinCAT 3 build 4024.0)
- Es genügt die „Build Environments“ zu installieren.
- Die Umgebungsvariable setzen (Variablenname WINDDK7, Variablenwert <Installationsverzeichnis> z.B. C:\WinDDK\7600.16385.1)
- TwinCAT 3 XAE Build 4024
Auf dem Laufzeit-PC
- IPC oder Embedded CX PC mit Microsoft Betriebssystem basierend auf „Windows NT Kernel“ (Win XP, Win 7 und entsprechende embedded Versionen, Win 10)
- TwinCAT 3 XAR Build 4024
- TwinCAT 3.1 unterstützt 32 Bit und 64 Bit Betriebssysteme. Ist das Target ein x64-System, müssen die erstellten Treiber signiert werden. Das TE1400 unterstützt OS Treibersignierung. Sehen Sie dazu „x64: Treibersignierung“ im Handbuch TwinCAT 3 C++
Zusätzlich zu den obigen Anforderungen, die aus den Anforderungen von TwinCAT 3 C/C++ stammen, werden auf dem Engineering PC benötigt:
- MATLAB®/Simulink® R2010b bis einschließlich R2019a. Ab einschließlich R2019a wird die Nutzung von TE1400 Version 2.x.xxxx.x empfohlen.
- Simulink Coder™ (in MATLAB®-Versionen vor R2011a: Real-Time Workshop®)
- MATLAB Coder™ (in MATLAB®-Versionen vor R2011a: Teil des Real-Time Workshop®)
- Installation des TE1400 Target for MATLAB®/Simulink®
Installationsanleitung
- Installieren Sie eine der unterstützten Visual Studio-Versionen, falls nicht bereits vorhanden. Beachten Sie die Installation der C++-Komponenten.
- 1. Starten Sie das TwinCAT 3 Setup, falls nicht bereits vorhanden.
- Sollte eine Visual Studio- sowie TwinCAT-Installation bereits vorhanden sein, die Visual Studio Version jedoch nicht den oben genannten Anforderungen entsprechen (z. B. Visual Studio Shell oder Visual Studio ohne Visual C++), müssen Sie zunächst eine geeignete Visual Studio Version installieren (ggf. Visual C++ nachinstallieren). Danach müssen Sie das TwinCAT 3-Setup ausführen, um TwinCAT 3 in die neue (oder veränderte) Visual Studio-Version zu integrieren.
- 2. Installieren Sie, wenn erforderlich, das Microsoft Windows Driver Kit (siehe Installation "Microsoft Windows Driver Kit (WDK)" im Handbuch TwinCAT 3 C/C++).
Die Reihenfolge, wann das Windows Driver Kit installiert worden ist, ist unerheblich. - 3. Falls noch keine MATLAB®-Installation auf Ihrem System vorhanden ist, installieren Sie diese. Die Reihenfolge, wann MATLAB® installiert worden ist, ist unerheblich.
- 4. Starten Sie das Setup TE1400-TargetForMatlabSimulink zur Installation des TE1400.
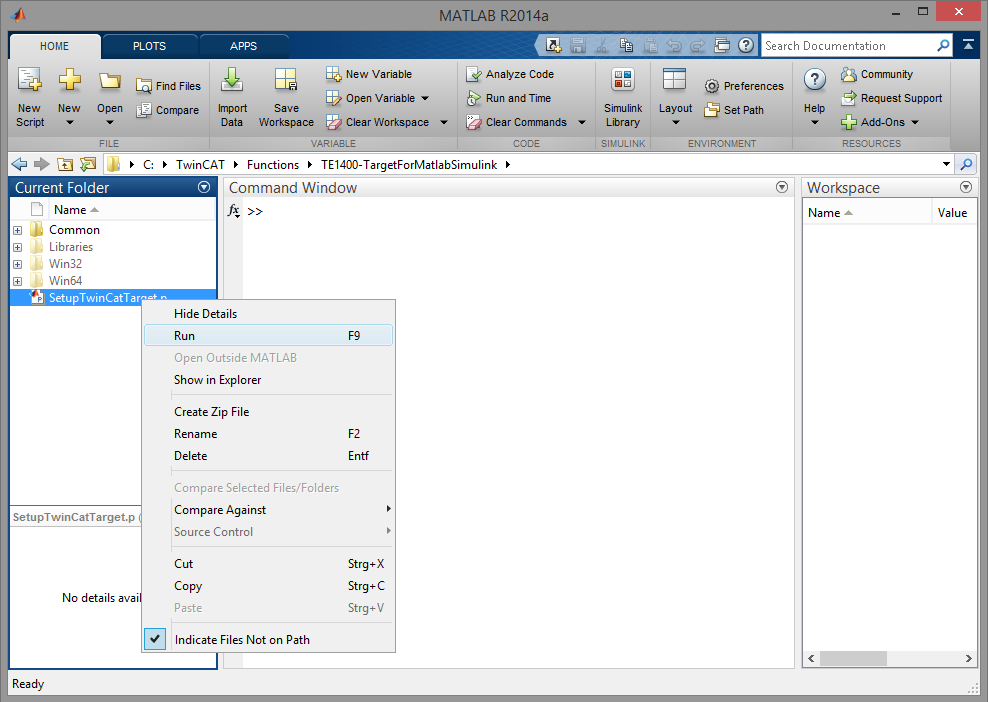
Die Installation des TE1400 erfolgt in den TwinCAT-Ordner, d. h. sie ist losgelöst von der MATLAB®-Installation. Das Verknüpfen einer auf dem System vorhandenen MATLAB®-Version mit dem TE1400 erfolgt durch Ausführung von Punkt 6. - 5. Starten Sie MATLAB® als Administrator und führen Sie %TwinCAT3Dir%..\Functions\TE1400-TargetForMatlabSimulink\SetupTwinCatTarget.p in MATLAB® aus.
- Es öffnet sich ein Fenster zur Einrichtung. Siehe dazu den folgenden Abschnitt.
- Das p-file verknüpft die verwendete MATLAB®-Version mit dem TE1400. Wenn eine neue MATLAB®-Version auf dem System installiert wird, muss das p-file in der neuen Version ausgeführt werden.
- Wenn eine neue TE1400 Version über eine vorhandene TE1400 Version installiert wird, sollte das p-file ebenfalls nochmal ausgeführt werden.
 | User Account Control Wenn MATLAB® in einem System mit aktiviertem User Account Control (UAC) ohne Administratorbefugnis ausgeführt wird, kann der MATLAB®-Pfad nicht dauerhaft gespeichert werden. In diesem Fall muss nach jedem Start von MATLAB® SetupTwinCatTarget.p ausgeführt werden, da sonst einige Dateien für die Generierung von TwinCAT-Modulen nicht gefunden werden können. |
| Treiber-Signierung für Targets mit x64-Betriebssystem Falls Sie als Laufzeit-PC ein x64-Betriebssystem nutzen möchten, ist eine Signierung der Treiber notwendig. Details finden Sie dazu im Handbuch TC3 C++ unter Treibersignierung. |