TwinCAT 3 Bode Plot - Erste Schritte
Um Ihnen einen schnellen Einstieg zu ermöglichen und die Arbeit mit dem TwinCAT 3 Bode Plot zu vereinfachen, werden auf dieser Seite die ersten Schritte zur Aufnahme eines Bode Plots zusammengefasst.
Wenn Sie ein Bode-Diagramm von einer TwinCAT-CNC-Achse erstellen wollen, beachten Sie die Hinweise zur Konfiguration von TwinCAT-CNC-Achsen am Ende des Abschnitts.
| |
Verletzungsgefahr durch automatisches Loslaufen der Antriebsachse Zur Erstellung des Bode-Diagramms führt die Antriebsachse einen von den Einstellungen abhängigen Bewegungsablauf durch. Mit dem Start der Aufnahme läuft die Antriebsachse eigenständig entsprechend des eingestellten Bewegungsprofils los und kann Mensch und Material gefährden. Während der Aufnahme ist die Antriebsachse weiterhin in den Applikationskontext eingebunden (z. B. Freigaben, Überwachung, ...).
|

Für das Grundverständnis ist es wichtig zu wissen, dass der TwinCAT 3 Bode Plot Teil der Measurement-Installation ist, die auch das Scope View und den Scope Server beinhaltet. Einige Funktionen werden Measurement-übergreifend genutzt. So steuert beispielsweise die Toolbar sowohl Scope- als auch Bode-Projekte. Da alle Measurement-Projekte für die Aufnahme der Daten den Scope Server nutzen, wird dieser immer mitinstalliert. Er kann aber über die Komponenteninstallation auch einzeln auf einem Zielgerät installiert werden.
- Für den Bode Plot ist zunächst die „Base“-Lizenz aktiviert, unabhängig davon, ob er durch ein eigenes Measurement-Setup oder durch das TwinCAT 3 XAE-Setup installiert worden ist.
- 1. Legen Sie ein neues Projekt an und wählen Sie aus den vorhandenen Measurement Templates das vorkonfigurierte Bode Project.
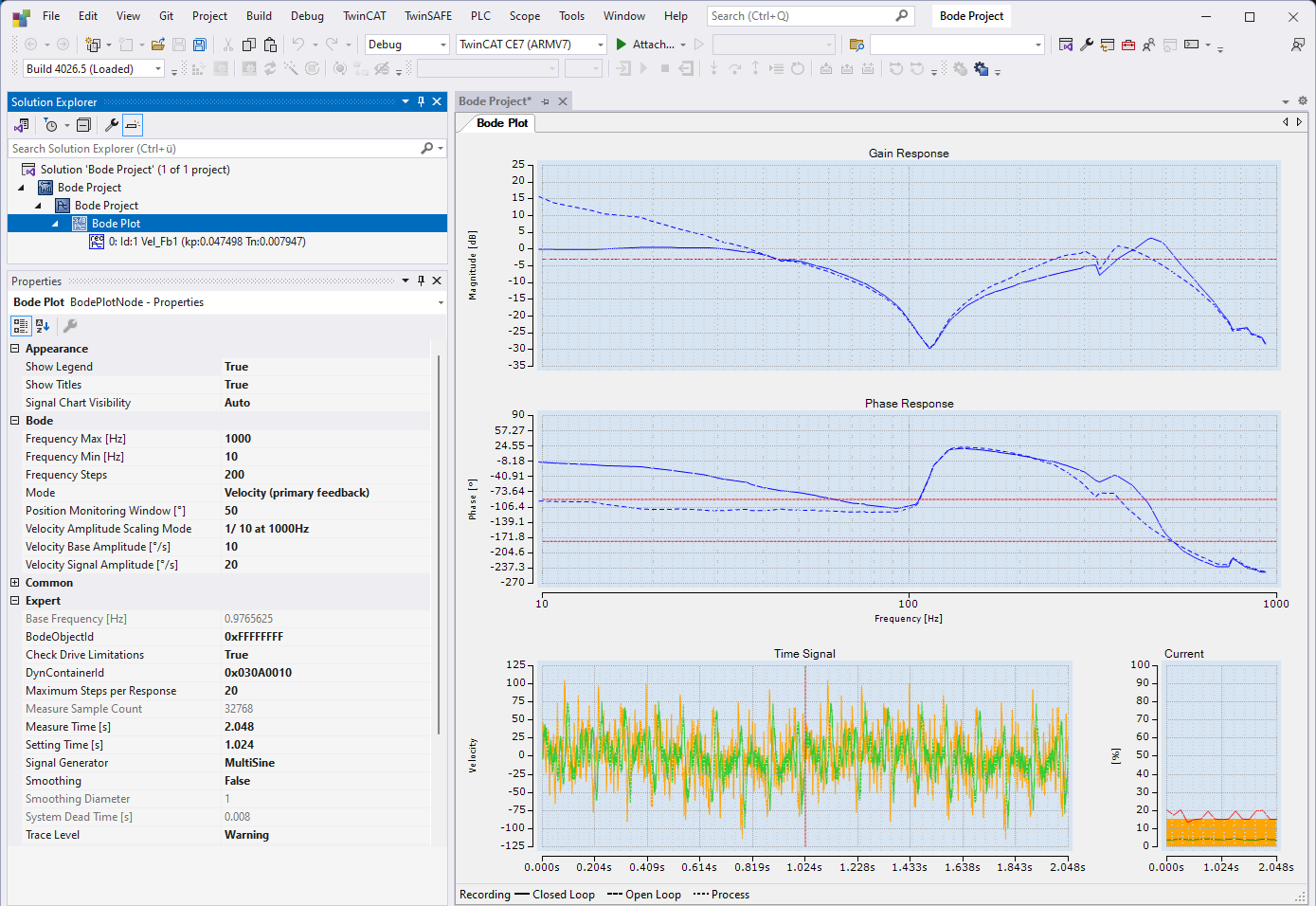
- 2. Im Solution Explorer öffnet sich eine Solution mit Projektbaum. Auf der untersten Ebene finden Sie den Bode Plot.
Im Properties-Fenster stellen Sie die Axis ID und Target Net ID für die Antriebsachse ein, zu welcher der Bode Plot erstellt werden soll.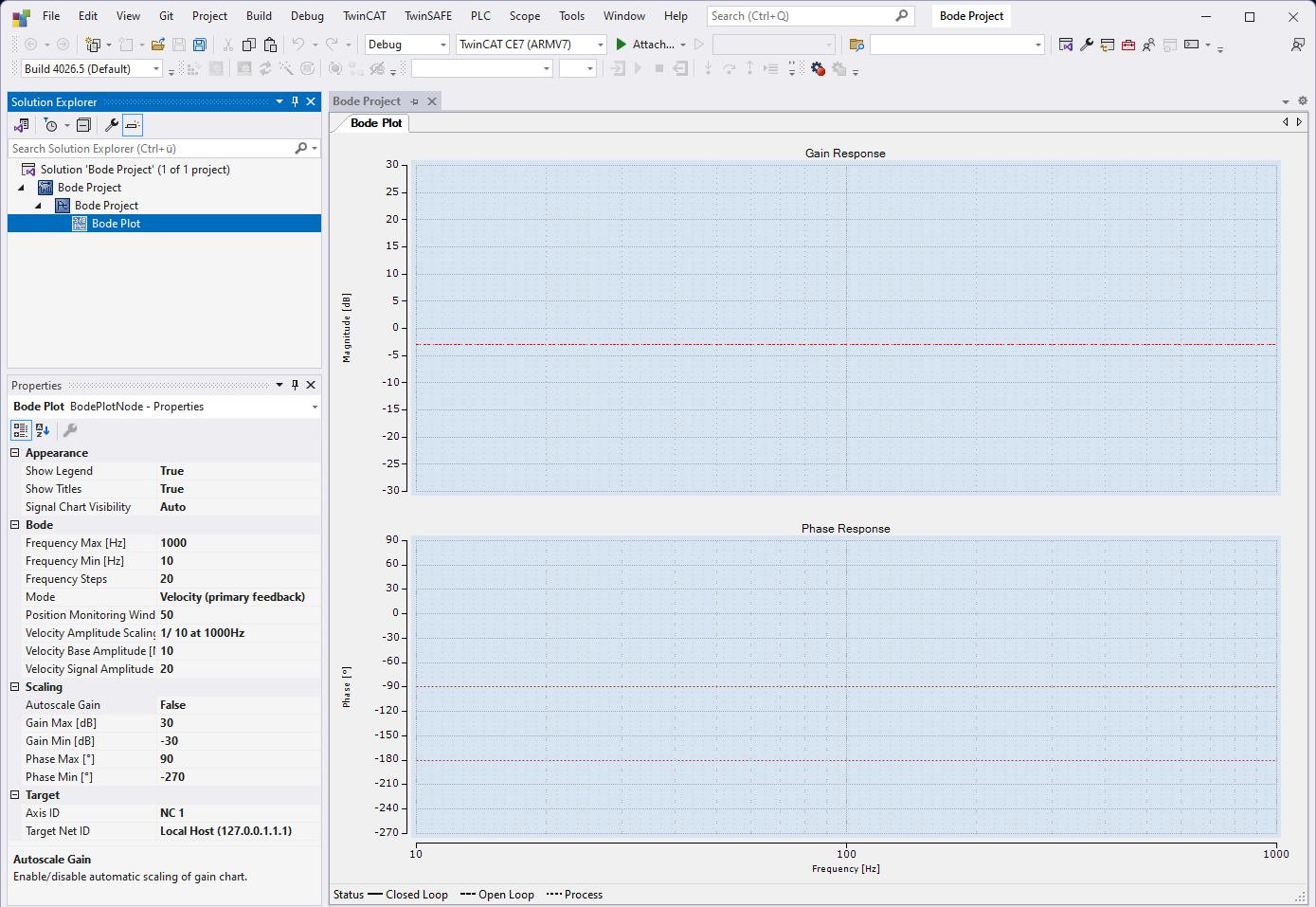
- 3. Bevor Sie die eigentlichen Aufnahme für den Bode Plot durchführen können, müssen Sie einmalig die Einstellungen am TwinCAT-Projekt anpassen.
Der Bode Plot wird im TwinCAT-System von einem TcCom-Objekt durchgeführt. Damit dieses automatisch aus dem Bode-Projekt erzeugt werden kann, müssen Sie die Class Factory für TcBodePlot und TcNcObjects bekannt machen.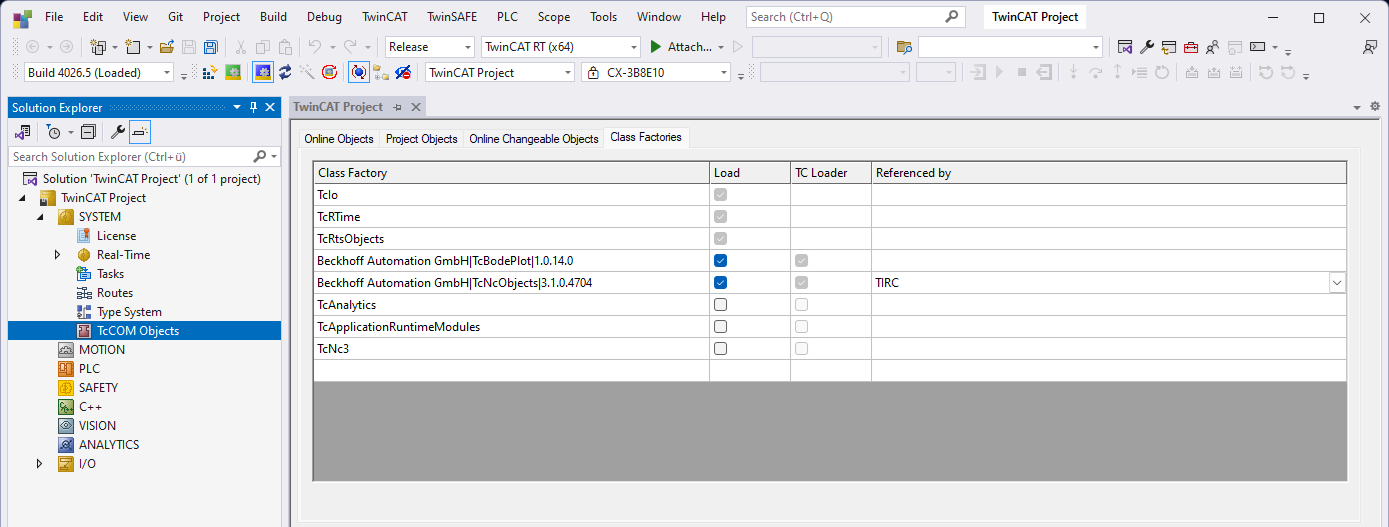
- 4. Zur dynamischen Kommunikation mit dem Antrieb reservieren Sie einmalig einen Speicherbereich pro EtherCAT Device, den so genannten Dynamic Container am EtherCAT Master.
Bestätigen Sie den folgenden Dialog zur Abfrage der Containergröße mit OK. Bei der Verwendung des Bode Plot basierten TcAutotuning ist eine Kontainergröße von 512 erforderlich.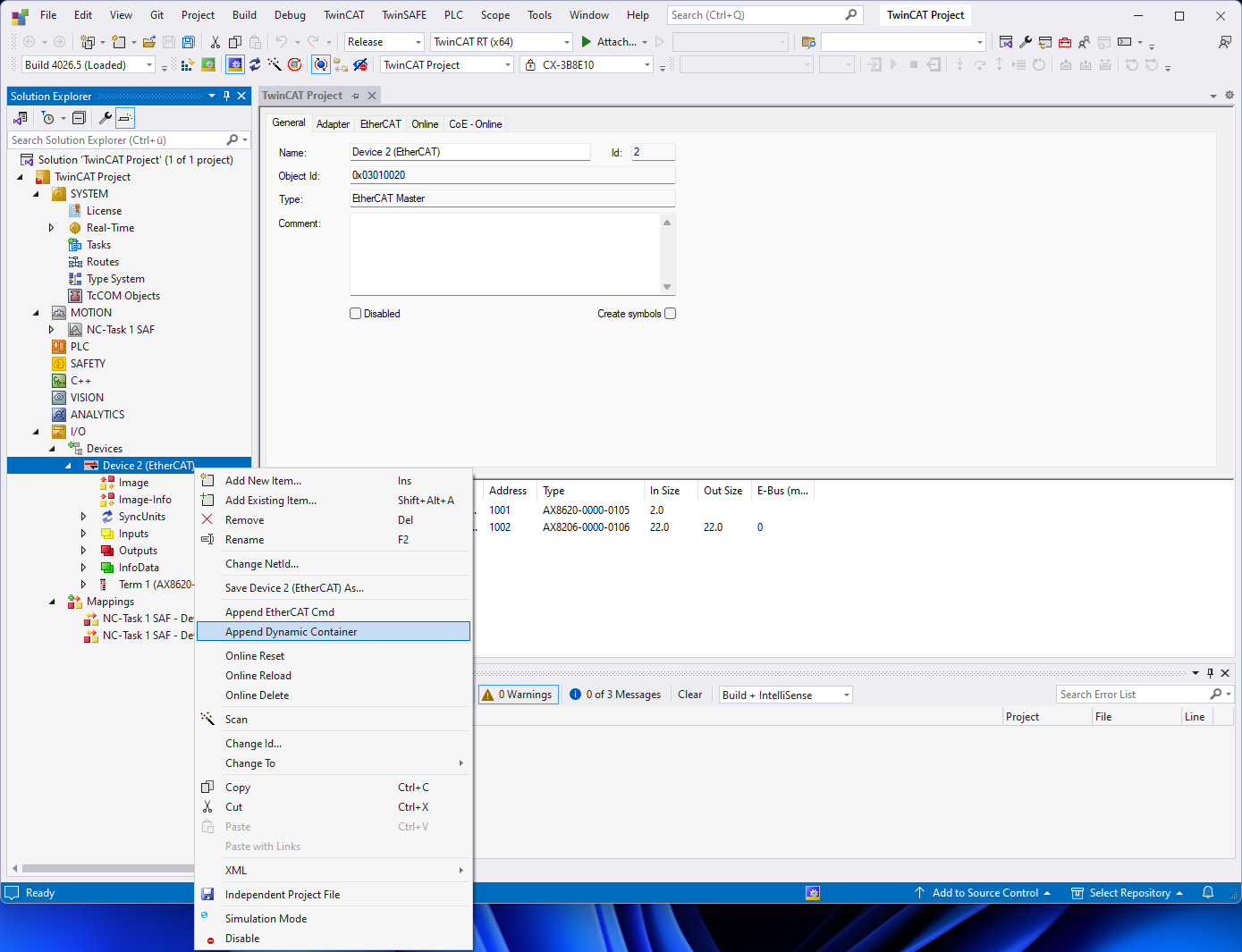
- Nachdem Sie das Zielsystem und die Antriebsachse ausgewählt haben, können Sie in den Properties des Bode Plot die Aufnahme parametrisieren. Die Details zu den Einstellungen finden Sie im Abschnitt „Bode Plot - Plot Eigenschaften“.
- 5. Über den Button Start Record in der Measurement Toolbar starten Sie den Bode Plot. Während der Aufnahme werden die aktuellen Zeitsignale unten im Plot angezeigt. Sie können die Aufnahme jederzeit über den Button Stop Record abbrechen.
- Wenn es während der Aufnahme zu Fehlern kommt, werden diese in der Error List der TwinCAT XAE Shell (bzw. Visual Studio) angezeigt. So meldet das Bode Plot z. B. eine fehlende Achsfreigabe oder das Fehlen eines Dynamic Containers beim Versuch die Aufnahme zu Starten

- Die Error List zeigt jedoch nur die Fehler, die von Projekten ausgegeben werden, die Teil der aktiven Solution sind.
Beispiel: Wenn für die Antriebsache ein Schleppabstandsfehler gemeldet wird und das Projekt nicht Teil der aktiven Solution ist, wird ein allgemeiner Fehler vom Bode Plot ausgegeben.
Wenn das Projekt Teil der aktiven Solution ist, dann wird der Fehler im Schleppabstand ebenfalls in der Error List ausgeben. - Nach der Aufnahme können Sie alle bisher erstellten Kennlinien einsehen.
- 6. In den Properties können Sie die Anzeigeoptionen ändern. So kann es z. B. sinnvoll sein, sich neben dem „Offenen Regelkreis“ und dem “Geschlossenen Regelkreis“ auch die „Strecke“ anzusehen (siehe Offener und geschlossener Regelkreis), oder einzelne Kennlinien hervorzuheben oder auszublenden. Details zu den Einstellungen finden Sie im Abschnitt „Bode Plot - Set Eigenschaften“.
Darüber hinaus können Sie auch Filter Sets zur Simulation von Filtern oder Result Sets zur Bestimmung von Überlagerungsergebnissen anfügen.
Die Verwendung von Markern erleichtert das Ablesen und Vergleichen der Ergebnisse.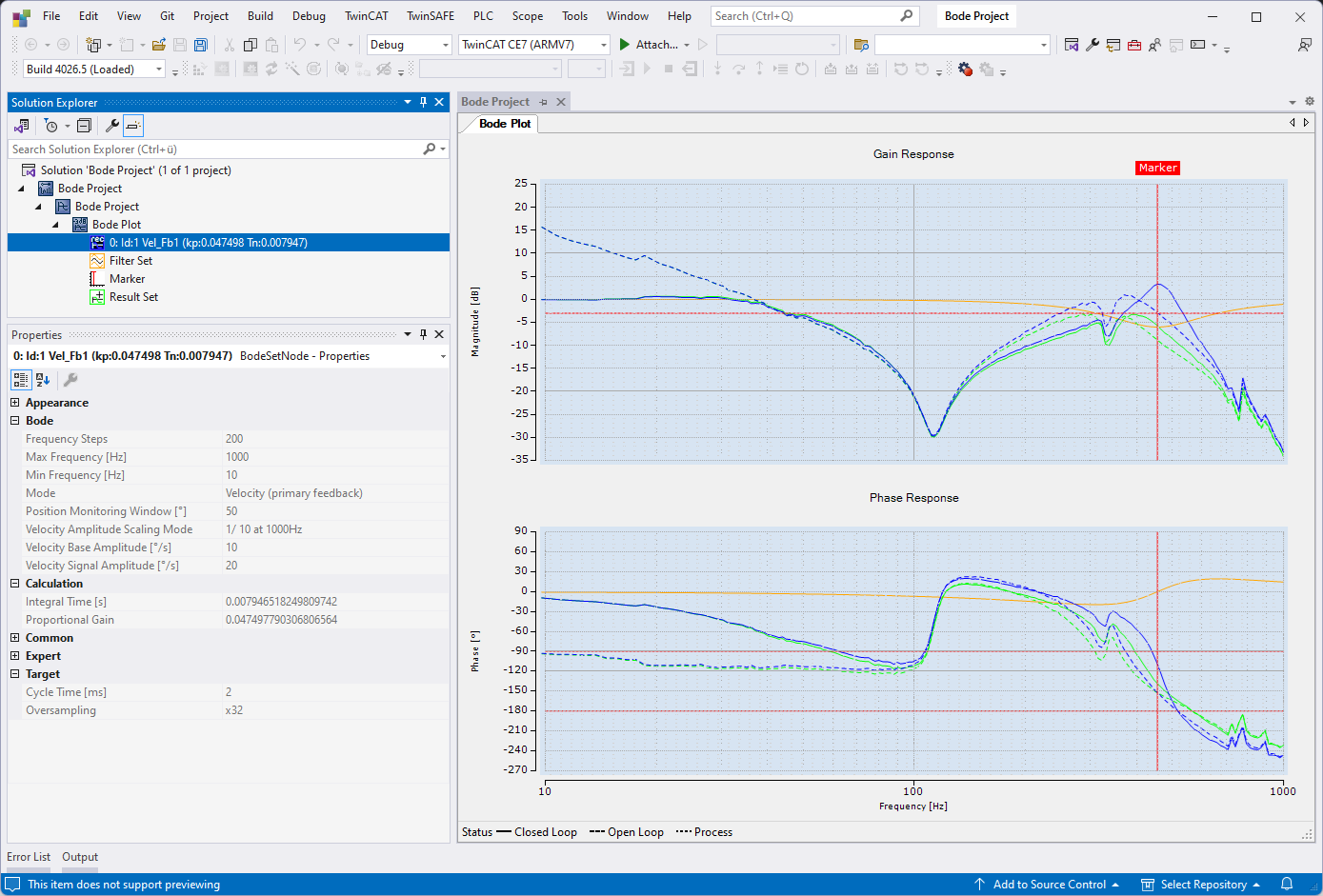
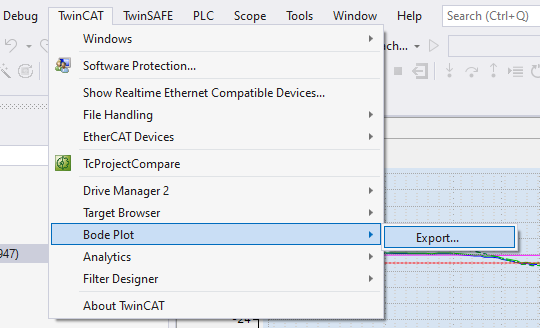
- 7. Nach der Aufnahme und Analyse der Frequenzgänge können Sie die Daten exportieren. Über das TwinCAT Menü können Sie den Measurement Export Wizard starten.
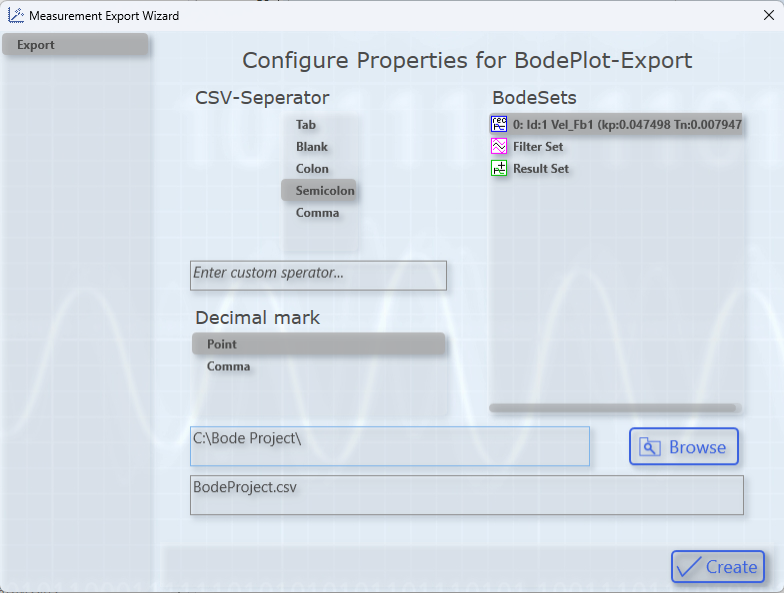
- 8. Im folgenden Fenster können Sie die gewünschten Bode-Elemente zum Exportieren auswählen und grundlegende Einstellungen für das CSV Format einstellen.
- Damit haben Sie die Aufnahme eines Bode Plots erstellt.
Hinweise zur Konfiguration von TwinCAT-CNC-Achsen
Wenn eine Bode-Plot-Aufnahme von einer TwinCAT-CNC-Achse erstellt werden soll, muss für diese im Achsparametersatz die passende Geschwindigkeitsnormierung f eingestellt werden.
Auf Grundlage der internen Geschwindigkeitsskalierung des AX5000 (1 Inkrement entspricht einer Geschwindigkeit von 5,588 10-5 U/min) wird diese nach der folgenden Formel berechnet:
Mit
f: Skalierungsfaktor [µm/min] bzw. [10-3°/min]
d: Vorschub pro Motorumdrehung [µm/U] bzw. [10-3°/U]
i: Getriebeübersetzungsverhältnis [-]
Der resultierende Faktor muss dann im Achsparametersatz der entsprechenden Achse eingetragen werden. Dies geschieht mittels der Parameter P-AXIS-00205 - P-AXIS-00207.
Beispiel:
Lineare Achse mit 5 mm Vorschub pro Motorumdrehung und Getriebeübersetzung 4.

Damit ergeben sich folgende Achsparameter:
antr.v_time_base | 0 | (P-AXIS-00207: Zeitbasis = 1/min) |
antr.v_reso_num | 100000 | (P-AXIS-00206: Zähler Normierungsfaktor) |
antr.v_reso_denom | 6985 | (P-AXIS-00205: Nenner Normierungsfaktor) |
Weitere Informationen zu den Achsparametern finden Sie im Beckhoff Information System:
TF5200 | TwinCAT 3 CNC Achsparameter