Bewegungsachsen mit „Verbindung“ erstellen – Empfohlenes Vorgehen
Im ersten Schritt der Simulationsvorbereitung richten Sie im CAD-Modell die Parameter der Bewegungsachsen ein oder passen diese an. Im Folgenden finden Sie die empfohlene Vorgehensweise für die Erstellung von Parametern in Autodesk® Inventor®. Bei dieser Vorgehensweise wird die Abhängigkeit des beweglichen Bauteils mit der Funktion „Gelenk“ festgelegt. Im folgenden Beispiel platzieren Sie den Ursprung eines Gelenks oben in der Linearführung an dem Fräser und wählen als Gelenkebene eine Fläche längs der Linearführung.
 | Für die Simulation macht es keinen Unterschied, welche Einheiten in den Baugruppen eingestellt sind. Die Einheiten der Bewegungsachsen und der Abstandssensoren werden in TwinCAT eingestellt. |
- Sie müssen keine Abhängigkeiten zwischen den beiden Baugruppen bzw. Bauteilen setzen.
- Bauteile sind in gewünschter Bewegungsrichtung dreh- oder verschiebbar.
- Bauteile bzw. Baugruppen, welche sich relativ zueinander bewegen sollen, sind nebeneinander platziert.
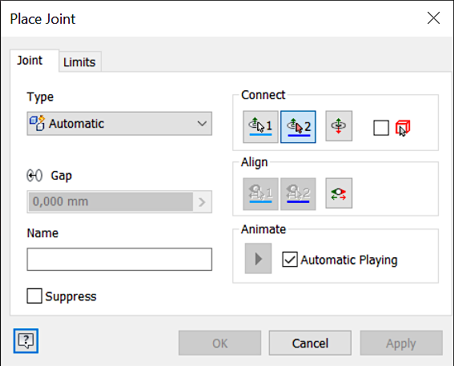
- 1. Klicken Sie auf Zusammenfügen>Verbindung>Gelenk.
- Das folgende Fenster öffnet sich:
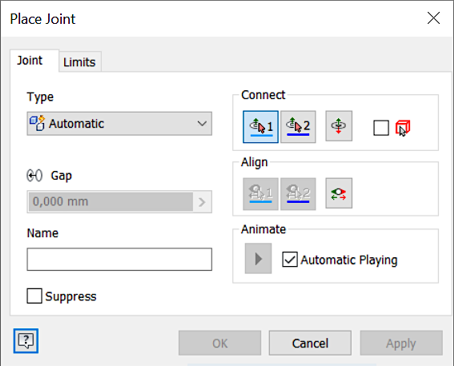
- 2. Wählen Sie unter Typ den gewünschten Gelenktyp aus.
Das können zum Beispiel „Verschiebbar“, „Drehbar“ oder „Automatisch“ sein. Beim Gelenktyp „Automatisch“ wählt Autodesk® Inventor® selbstständig je nach zu verbindenden Bauteilen den Gelenktyp aus. - 3. Um den Ursprung des Gelenks auf der ersten Baugruppe oder dem ersten Bauteil auszuwählen, klicken Sie unter Verbinden die Schaltfläche 1 an.
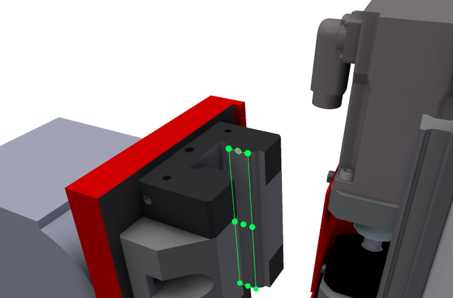
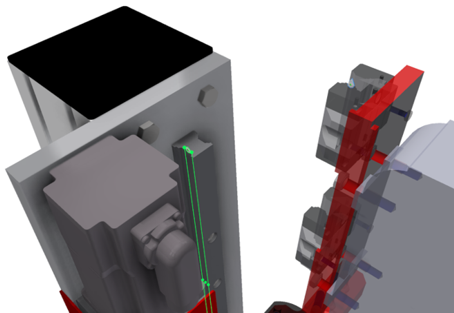
- 4. Wählen Sie nun den entsprechenden Punkt im CAD-Modell aus. Achten Sie hierbei auf die Gelenkebene.
- Im Bild sehen Sie, dass der Ursprung oben in der Linearführung an dem Fräser platziert wird.
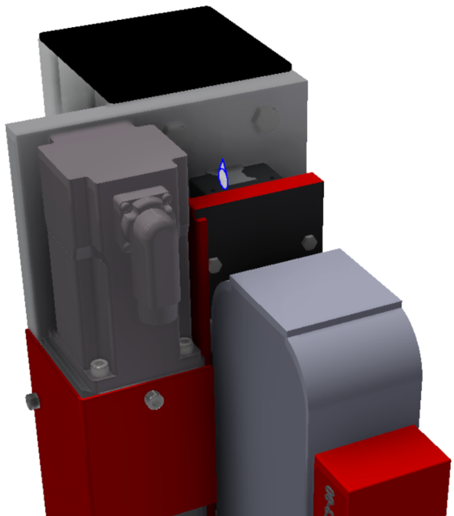
- Das folgende Negativbeispiel zeigt, wie der gleiche Punkt angewählt wurde, dieser aber auf der falschen Gelenkebene liegt.
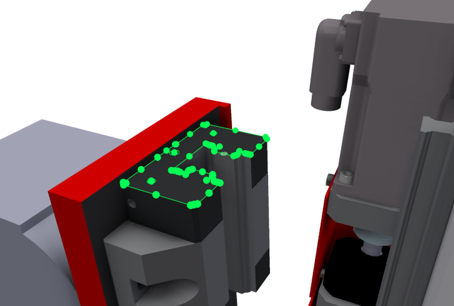
- Autodesk® Inventor® aktiviert nun automatisch die Schaltfläche 2 und Sie können den zweiten Punkt des Gelenks festlegen.
- 5. Legen Sie den zweiten Punkt des Gelenks an der zweiten Baugruppe oder dem zweiten Bauteil fest, indem Sie diesen im CAD-Modell auswählen.
- Nach erfolgreicher Gelenkdefinition (keine Konflikte) animiert Autodesk® Inventor® das Gelenk. Wenn Sie das Gelenk im Modellbaum anklicken, dann wird in Autodesk® Inventor® der Gelenkursprung sowie die (positive) Bewegungsrichtung angezeigt.
Bei Bedarf können Sie die Bewegungsrichtung später in TwinCAT über die TcCom-Optionen mit „InvertDirection“ anpassen. Auch eine Anpassung des Gelenkursprungs ist eventuell über die TcCom-Option Offset in TwinCAT einfacher einzustellen als in Autodesk® Inventor®. Dieses Vorgehen empfehlen wir. - 6. Klicken Sie unter Zusammenfügen>Verwalten auf Parameter.
- Das folgende Fenster wird geöffnet:
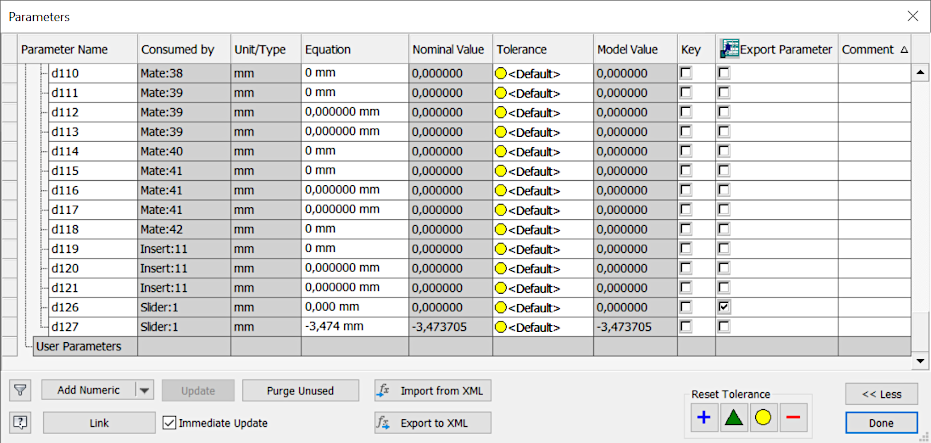
- Die untersten beiden Einträge gehören zum definierten Slider-Gelenk. Der Parameter „d126“ beschreibt hierbei den Abstand der beiden ausgewählten Gelenkebenen zueinander. Der Parameter „d127“ beschreibt den Verfahrweg. Für TwinCAT 3 Interface for Inventor® ist nur „d127“ von Bedeutung. Wir empfehlen, Parametern einen eindeutigen Namen zu geben.
- 7. Um den Parameter umzubenennen, klicken sie in die linke Spalte der Tabelle.
- 8. Tragen Sie den gewünschten Namen ein. Beachten Sie hierbei die Möglichkeit Präfixe zu vergeben, um später danach zu filtern.
- 9. Bestätigen Sie mit Fertig.
- Das Slider-Gelenk ist nun in der entsprechenden Baugruppe definiert und kann innerhalb dieser Baugruppe bewegt werden.
- 10. Konfigurieren Sie das TwinCAT 3 Interface for Inventor® gegebenenfalls vor der Initialisierung der Laufzeit.
- 11. Initialisieren Sie die Runtime in Autodesk® Inventor® und nutzen Sie die Funktion ScanIO in Ihrem TwinCAT-Projekt.
- 12. Verknüpfen Sie die Eingänge des I/O-Masters mit den zugehörigen Eingängen im SPS-Projekt. Verknüpfen Sie jeweils einen Ausgang des I/O-Masters mit einem Ausgang einer NC-Achse oder einem passenden Ausgang im SPS-Projekt.
Siehe dazu Kapitel IO-Master in TwinCAT anlegen. - 13. Aktivieren Sie das TwinCAT-Projekt.
- Die Abfrage, ob das TwinCAT-System im Run Mode gestartet werden soll, erscheint.
- 14. Bestätigen Sie mit OK.
- Die Simulation ist aktiviert, befindet sich aber im Pausenzustand.
- 15. Um die Runtime zu triggern, klicken Sie auf den Button Fortsetzen im TE1130 Inventor®-Add-in.
- Die Simulation ist aktiv und das TwinCAT-Projekt wird durch die Usermode Runtime getriggert.