TwinCAT 3 Interface for Inventor® konfigurieren
Mit der Schaltfläche Konfiguration im TwinCAT Add-in öffnen Sie das Konfigurationsfenster. In diesem nehmen Sie Einstellungen für die Achsen und Sensoren vor.
Einstellungen im Konfigurationsfenster
Im Konfigurationsfenster können Sie folgende Einstellungen vornehmen:
- 1. Klicken Sie auf die Schaltfläche Konfiguration im TwinCAT Add-in.
- Der TwinCAT TE1130 Konfigurator, in dem die Konfigurationen vorgenommen werden können, wird geöffnet. Die Registerkarte Antriebskonfigurator ist geöffnet.
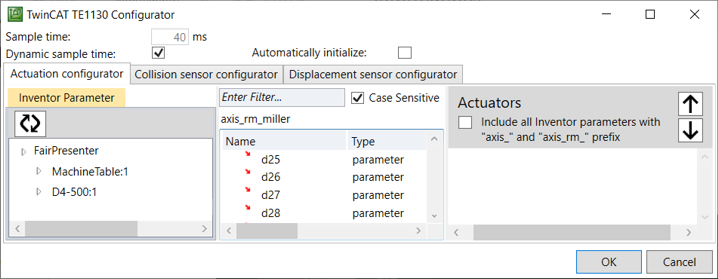
- Im Eingabefeld Schrittweite steht der Default-Wert 40 ms.
- 2. Aktivieren Sie das Auswahlkästchen bei Dynamische Schrittweite, damit sich die Schrittweite automatisch anpasst.
- Die Schrittanzahl von TwinCAT passt sich an die Berechnungsdauer des CAD-Systems an.
- 3. Aktivieren Sie das Auswahlkästchen bei Automatische Initialisierung, damit die TwinCAT Runtime für das Modell beim Öffnen sofort automatisch initialisiert wird.
- 4. Unter dem Reiter Antriebskonfigurator wählen Sie Parameter als Bewegungsachsen aus.
- 5. Aktivieren Sie das Auswahlkästchen Antriebe, um Achsen anhand ihres Namens zu filtern.
- Alle Gelenke, die das Präfix „axis_“ im Namen haben, werden automatisch gefiltert und ausgewählt.
- 6. Unter dem Reiter Kollisionssensorkonfigurator konfigurieren Sie Kollisionssensoren.
- 7. Unter dem Reiter Abstandssensorkonfigurator wählen Sie Parameter als Abstandsensoren aus.
- 8. Aktivieren Sie das Auswahlkästchen Abstandssensoren, um Achsen anhand ihres Namens zu filtern.
- Alle Gelenke, die das Präfix „sensor_“ im Namen haben, werden automatisch gefiltert und ausgewählt.
- Die weiterführenden Konfigurationen finden Sie im Folgenden.
Schrittweite einstellen
Im TwinCAT-Konfigurator werden mit der Schrittweite die Ticks per Sample für die Usermode Runtime eingestellt. Das heißt, dass bei einer eingestellten Schrittweite von 40 ms und einer Basetime von 1 ms in TwinCAT pro Schreiben von neuen Parameterwerten oder Lesen von Sensorwerten in der Steuerung 40 Ticks ausgeführt werden. Je kleiner dieser Wert ist, desto flüssiger bewegen sich die Achsen in Inventor®, aber desto langsamer läuft die Steuerung.
Achsen ohne Filterfunktion auswählen
- Sie befinden sich im Reiter Antriebskonfigurator.
- Die Filterfunktion für Antriebe ist deaktiviert.
- 1. Um Achsen auszuwählen, ziehen Sie die gewünschten Parameter per Drag-and-Drop in den rechten Auswahlbereich des Konfigurationsfensters.
- 2. Mit den Pfeiltasten können Sie die Anordnung der Achsen verändern. Dieses hat keinen Einfluss auf die Reihenfolge, in der diese im IO Master angelegt werden.
- Die gewählten Achsen können nun für die Simulation verwendet werden.
Abstandssensoren ohne Filter auswählen
- Sie befinden sich im Reiter Abstandssensorenkonfigurator.
- Die Filterfunktion für Abstandssensoren ist deaktiviert.
- 1. Um Abstandssensoren auszuwählen, ziehen Sie diese aus der Parameterliste in den rechten Auswahlbereich des Konfigurationsfensters.
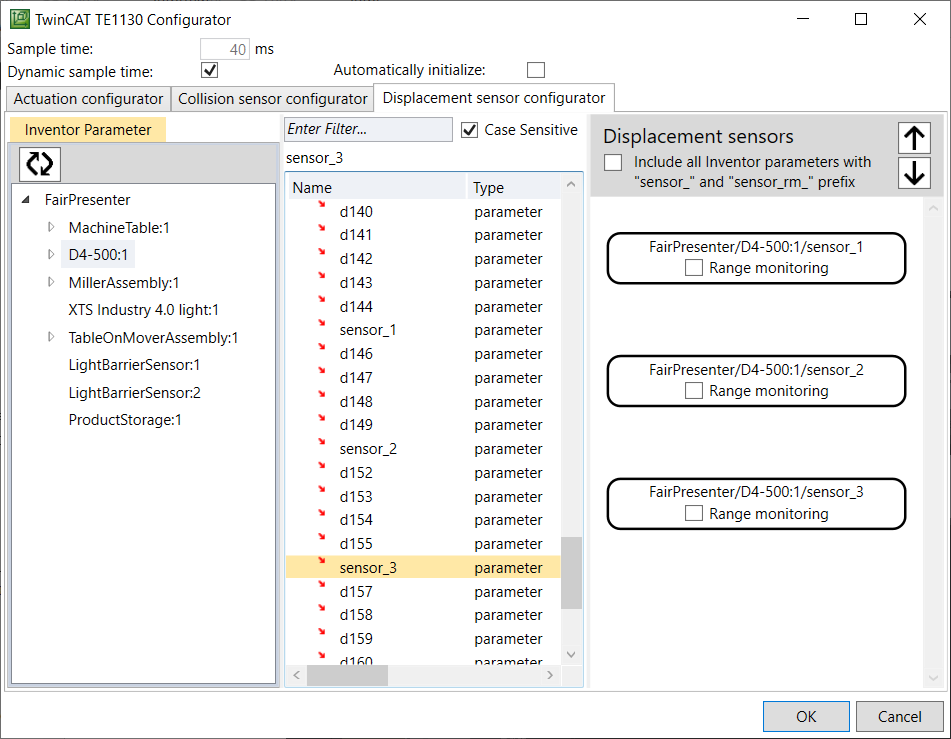
- 2. Mit den Pfeiltasten können Sie die Reihenfolge der ausgewählten Abstandssensoren verändern. Dieses hat keinen Einfluss auf die Reihenfolge, in der diese im IO Master angelegt werden.
- Sie können die gewählten Abstandssensoren nun für die Simulation verwenden.
Filterfunktion einstellen
Für die Konfiguration von Achsen und Sensoren können Sie eine Filterfunktion nutzen, über welche die gewünschten Parameter automatisch gefiltert und ausgewählt werden. Um diese Funktion zu nutzen, benennen Sie die gewünschten Parameter passend mit einem Präfix. Für Achsen nutzen Sie das Präfix „axis_“, zum Beispiel „axis_xxx“. Gelenken, die als Sensor genutzt werden sollen, geben Sie einen Namen mit dem Präfix „sensor_“, zum Beispiel „sensor_xxx“. Wenn Sie die Parameter passend benannt haben, werden diese automatisch ausgewählt.
Um Achsen und Sensoren passend zu benennen, gehen Sie wie folgt vor:
- 1. Wählen Sie den Reiter Zusammenfügen.
- 2. Wählen Sie Parameter.
- 3. Das Fenster Parameter öffnet sich.
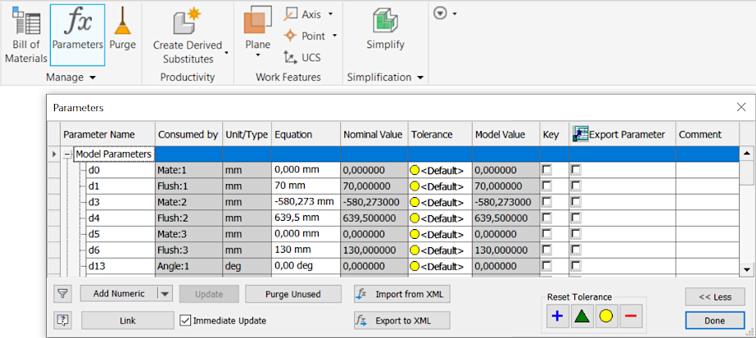
- 4. Klicken Sie in das Feld mit dem gewünschten Parameter.
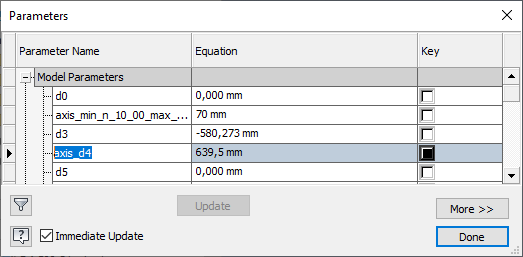
- 5. Tippen Sie die gewünschte Benennung mit passendem Präfix ein.
- 6. Bestätigen Sie mit der Schaltfläche Fertig.
- Die Parameter wurden umbenannt.
Um Achsen zu filtern und auszuwählen, gehen Sie wie folgt vor:
- 1. Öffnen Sie das TwinCAT Add-in.
- 2. Klicken Sie auf die Schaltfläche Konfiguration.
- Das Fenster TwinCAT TE1130 Konfigurator öffnet sich.
- 3. Setzen Sie den Haken im Auswahlkästchen Antriebe bzw. Abstandssensoren.
- Der rechte Auswahlbereich des Konfigurationsfensters wird ausgegraut und es werden nur die Achsen und Sensoren mit Präfix ausgewählt.
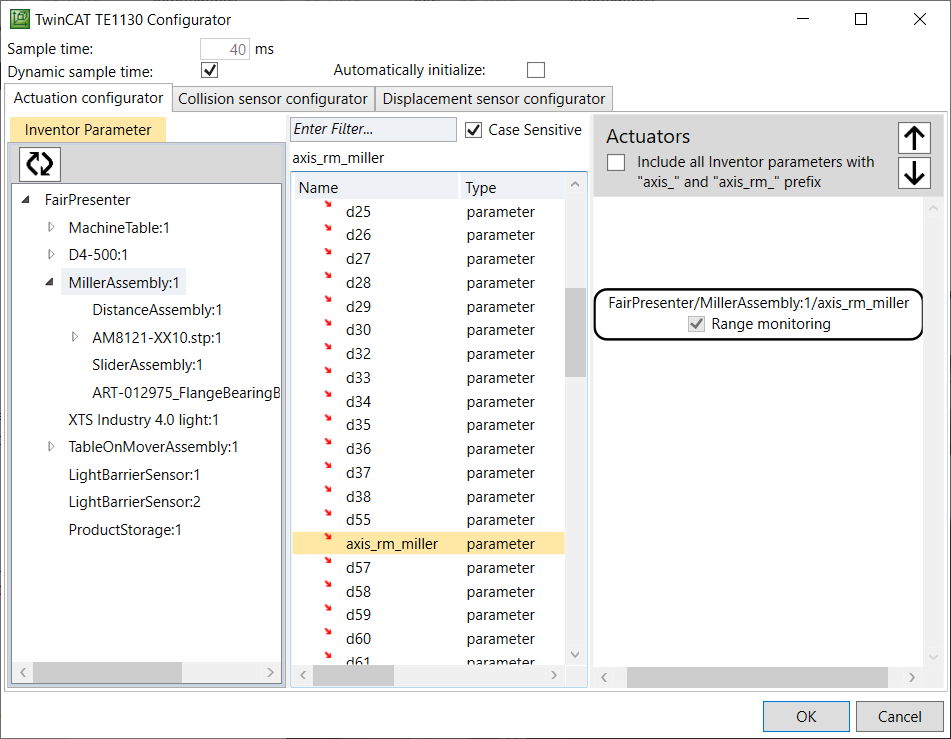
Bereichsüberwachung
Die Bereichsüberwachung wird im Konfigurationsfenster aktiviert und deaktiviert. Die untere und die obere Grenze der Bereichsüberwachung wird im TwinCAT-Projekt nach dem Scannen gesetzt.
Sie haben zwei Möglichkeiten die Bereichsüberwachung zu aktivieren oder zu deaktivieren:
Checkbox:
- 1. Setzen oder entfernen Sie den Haken vor Bereichsüberwachung.

- Die Bereichsüberwachung des gewählten Parameters ist jetzt aktiviert oder deaktiviert.
Präfix:
- 1. Tragen Sie im Präfix der Achse oder des Sensors das Kürzel „rm“ ein.
- Für die Achsen und Sensoren mit dem Präfix „axis_rm_“ beziehungsweise „sensor_rm_“ wird die Bereichsüberwachung aktiviert.
Kollisionssensoren konfigurieren
Zur Kollisionserkennung müssen Sie Sensoren anlegen.
- 1. Öffnen Sie die Registerkarte Kollisionssensorkonfigurator.
- 2. Betätigen Sie den Button Sensor hinzufügen.
- Im rechten Auswahlbereich des Konfigurationsfensters wird eine Sensorkonfiguration hinzugefügt.
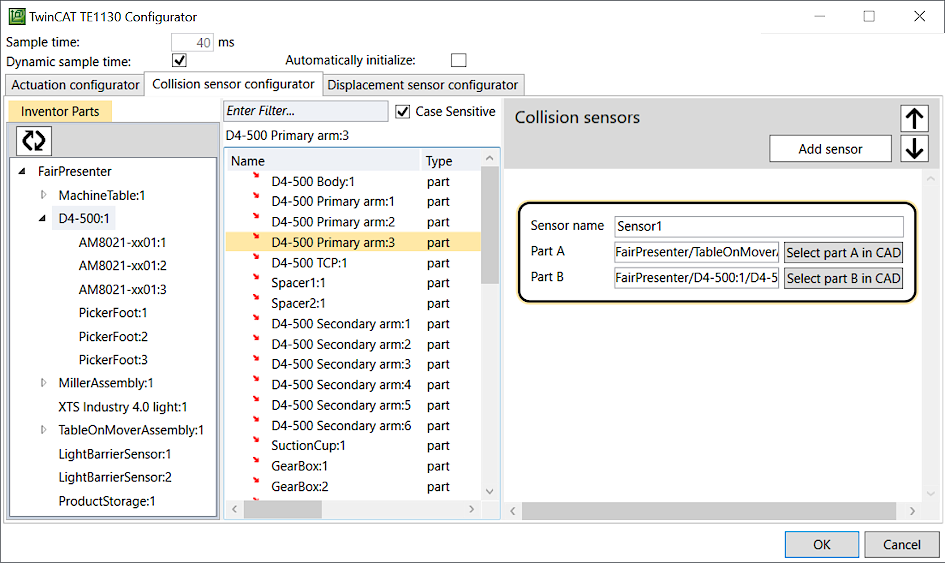
- 3. Benennen Sie den Sensor.
- Ab hier haben Sie zwei Möglichkeiten:
- 1. Ziehen Sie die Bauteile, bei denen eine Kollision überprüft werden soll, per Drag-and-Drop in die Felder Bauteil A und Bauteil B.
- 2. Klicken Sie auf die Schaltfläche Teil A im CAD wählen oder Teil B im CAD wählen und wählen Sie dann das Bauteil im CAD-Modell aus.
- Dieser Sensor wird über das TMC File im IO-Master im Systemmanager angezeigt und lässt sich dort verknüpfen. Sie finden die Sensoren unter der E/A-Gruppe InventorCollisionsSensors.
Einstellungen im Konfigurationsfenster beendet
Im nächsten Schritt verknüpfen Sie die Achsen und Sensoren miteinander, siehe Kapitel IO-Master in TwinCAT anlegen. Nach der Verknüpfung muss das TwinCAT-Projekt aktiviert werden. Die Usermode Runtime kann sowohl aus TwinCAT als auch aus Autodesk® Inventor® mit den Start- und Stop-Buttons gestartet bzw. gestoppt werden.