Bewegungsachsen mit „Abhängig machen“ erstellen
Bei der im Folgenden beschriebenen Vorgehensweise wird die Abhängigkeit des beweglichen Bauteils mit der Funktion „Abhängig machen“ festgelegt und so der Parameter erstellt.
 | Für die Simulation macht es keinen Unterschied, welche Einheiten in den Baugruppen eingestellt sind. Die Einheiten der Bewegungsachsen und der Abstandssensoren werden in TwinCAT eingestellt. |
- Das Bauteil muss in gewünschter Bewegungsrichtung dreh- oder verschiebbar sein.
- 1. Klicken Sie auf die Funktion Abhängig machen.
- 2. Erstellen Sie einen Parameter, indem Sie einen der folgenden Abhängigkeitstypen auswählen:
Passend bei translatorischer Bewegung – mit den Modi „Fluchtend“ und „Passend“
Winkel bei rotatorischer Bewegung – mit den Modi „gerichteter Winkel“, „ungeleiteter Winkel“ und „expliziter Referenzvektor“.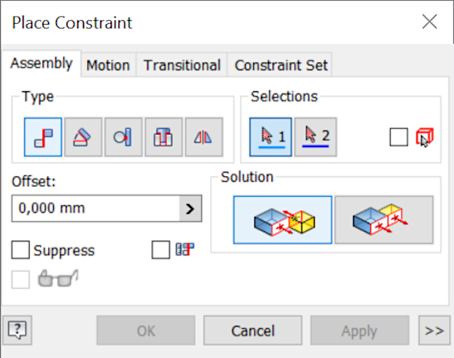
- 3. Wählen Sie in diesem Beispiel fluchtend aus.
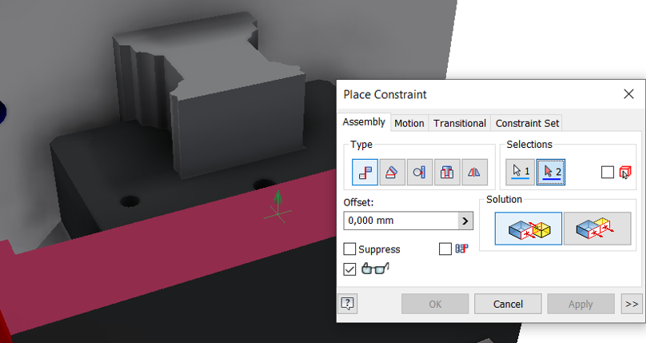
- 4. Wählen Sie die Referenzkante oder Ebene auf dem zu bewegendem Bauteil (violett) aus.
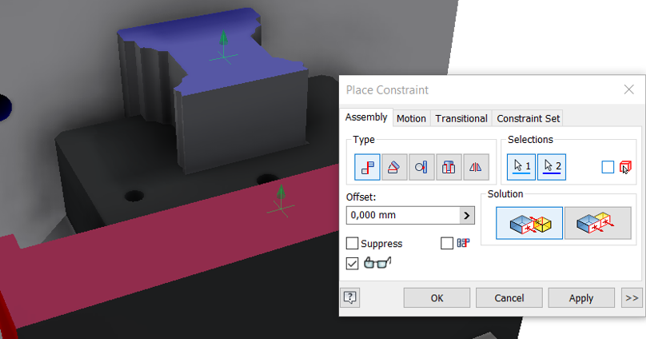
- 5. Wählen Sie die Referenzkante oder Ebene auf dem Bauteil aus, zu dem sich das Bauteil (blau) relativ bewegen soll.
- Nach dem Platzieren der Abhängigkeit wird der Parameter als Abhängigkeit im Modellbaum an die abhängigen Bauteile angefügt.
- In der Parameterliste wird die erstellte Abhängigkeit als Parameter unten angefügt.
- 6. Benennen Sie den Parameter durch Doppelklicken auf den Namen um, sodass Sie ihn für die Verknüpfung leichter finden können.
- In der Parameterliste wird die erstellte Abhängigkeit als Parameter unten angefügt.
- 7. Konfigurieren Sie das TwinCAT 3 Interface for Inventor® gegebenenfalls vor der Initialisierung der Laufzeit.
- 8. Initialisieren Sie die Runtime aus Autodesk® Inventor® und nutzen Sie die Funktion ScanIO in Ihrem TwinCAT-Projekt.
- 9. Verknüpfen Sie die Eingänge des I/O-Masters mit den zugehörigen Eingängen im SPS-Projekt. Verknüpfen Sie jeweils einen Ausgang des I/O-Masters mit einem Ausgang einer NC-Achse oder einem passenden Ausgang im SPS-Projekt.
Siehe dazu Kapitel IO-Master in TwinCAT anlegen. - 10. Aktivieren Sie das TwinCAT-Projekt.
- Die Abfrage, ob das TwinCAT-System im Run Mode gestartet werden soll, erscheint.
- 11. Bestätigen Sie mit OK.
- Die Simulation ist aktiviert, befindet sich aber im Pausenzustand.
- 12. Um die Runtime zu triggern, klicken Sie auf den Button Fortsetzen im TE1130 Inventor®-Add-in.
- Die Simulation ist aktiv und das TwinCAT-Projekt wird durch die Usermode Runtime getriggert.