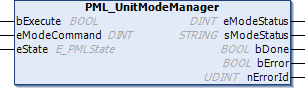
PML_UnitModeManager
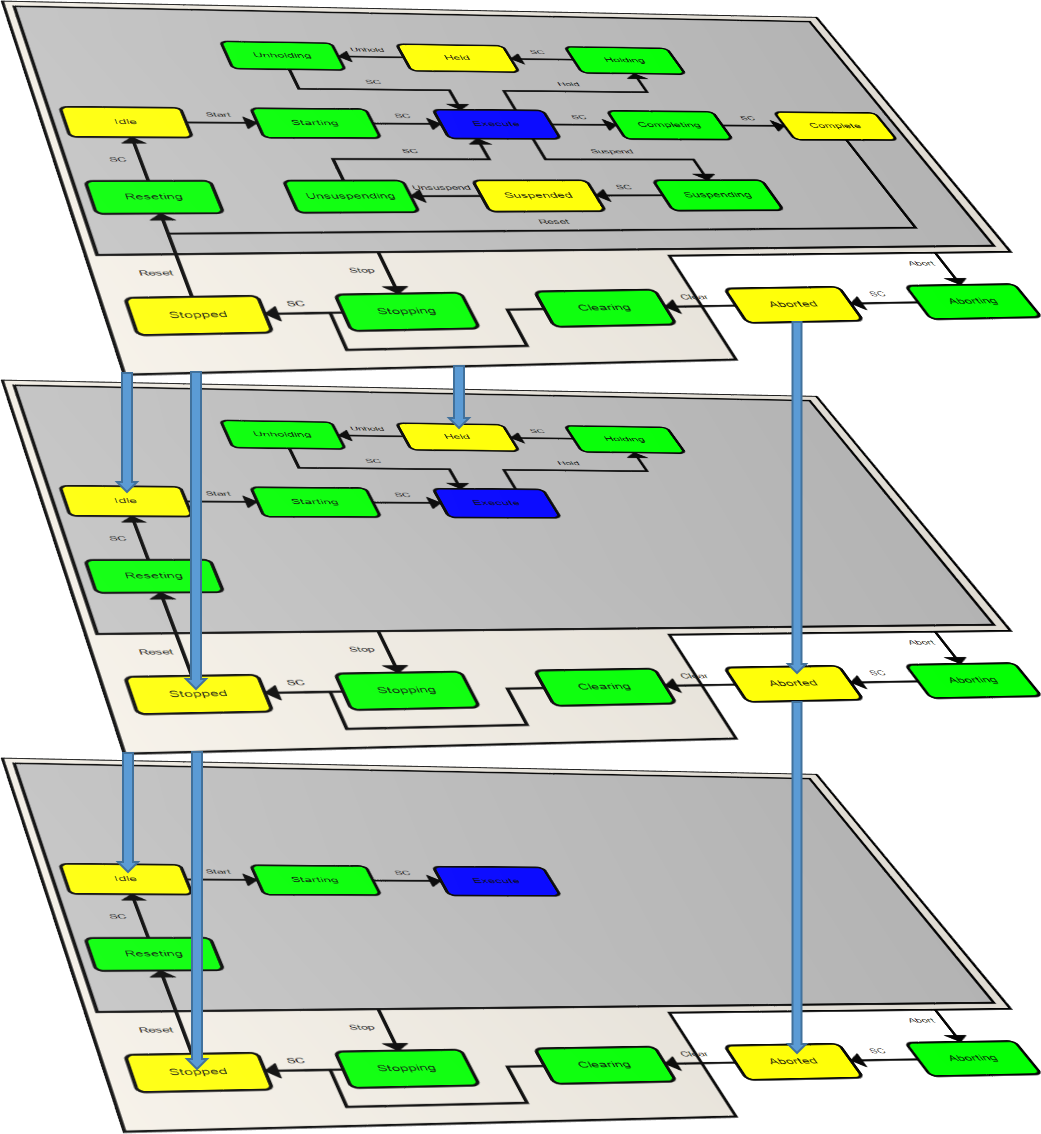
Maschinen haben andere Anlagenmodi als „Production“. Jeder Anlagenmodus ist durch ein eigenes Zustandsmodell definiert. Für Übergänge zwischen den Modi muss ein „Mode Manager“ definiert werden. Der „Mode Manager“ entscheidet, wie und in welchen Zustand eine Maschine Anlagenmodi ändern kann, d.h. eingebaute Sperren verhindern, dass die Maschine in ungeeignete Zustände wechselt. Für die Grundmodi „Production“, „Maintenance“ und „Manual“ sind diese Sperren fest definiert, wie die Darstellung unten zeigt. Für weitere über den PML_UnitModeConfig-Baustein definierte Modi kann dies individuell festgelegt werden.
| |
Ordnungsgemäße Modusänderungen einhalten Die Logik für Übergänge zwischen den Modi ist abhängig von der Anwendung, insbesondere für Übergänge zwischen „Manual“- und „Production“-Modus. Für solche Modusänderungen können darüber hinaus Hardwaresperren oder Sicherheitsausrüstung erforderlich sein. Die Verantwortung für ordnungsgemäße Moduswechsel liegt bei demjenigen, der sie implementiert. |

 Eingänge
Eingänge
VAR_INPUT
bExecute : BOOL;
eModeCommand : DINT;
ePMLState : E_PMLState;
END_VARName | Typ | Beschreibung |
|---|---|---|
bExecute | BOOL | Moduswechsel bei steigender Flanke |
eModeCommand | DINT | Angeforderter Modus |
ePMLState | E_PMLState | Enumeration, die den aktuellen PML-Zustand der automatischen Zustandsmaschine liefert. |
 Ausgänge
Ausgänge
VAR_OUTPUT
eModeStatus : DINT;
sModeStatus : STRING;
bDone : BOOL;
bError : BOOL;
bErrorID : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
eModeStatus | DINT | Aktueller PML-UnitMode |
sModeStatus | STRING | Name des aktuellen PML-UnitMode |
bDone | BOOL | Wird TRUE, sobald der Modus-Wechsel erfolgreich durchgeführt wurde. |
bError | BOOL | Wird TRUE, sobald ein Fehler eintritt. |
nErrorID | UDINT | Liefert bei einem gesetzten bError-Ausgang die Fehlernummer. |
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS-Bibliothek |
|---|---|---|
Ab TwinCAT v3.1 Build 4018 | PC (i386) | Tc3_PackML_V2 |