FB_SoEWrite

Mit dem Funktionsbaustein FB_SoEWrite kann ein Parameter geschrieben werden.
 Eingänge
Eingänge
VAR_INPUT
NetId : T_AmsNetID := '';
Idn : WORD;
Element : BYTE;
SrcBuf : PVOID;
BufLen : UDINT;
Execute : BOOL;
Timeout : TIME := DEFAULT_ADS_TIMEOUT;
Password : ST_SoE_String;
END_VARName | Typ | Beschreibung |
|---|---|---|
NetId | T_AmsNetID | String, der die AMS-Netzwerkkennung des PCs enthält (Typ: T_AmsNetId). |
Idn | WORD | Parameternummer, auf die sich FB_SoERead bezieht, z. B. „S_0_IDNs + 47“ für S-0-0047, siehe AX5000 Idn-Beschreibung. |
Element | BYTE | Gibt an, auf welchen Teil des Parameters zugegriffen werden soll, z. B. 16#40 ist der Wert (Value) des Parameters. Meist kann nur auf den Wert schreibend zugegriffen werden, andere Bestandteile des Parameters sind schreibgeschützt.
|
SrcBuf | PVOID | ADR() der Variablen, die den zu schreibenden Wert enthält. |
BufLen | UDINT | SIZEOF() der Variablen, in die der Wert gelesen werden soll. |
Execute | BOOL | Der Funktionsbaustein wird über eine positive Flanke an diesem Eingang aktiviert. |
Timeout | TIME | Maximale Zeit, die bei der Ausführung des Funktionsbausteins nicht überschritten werden darf. |
Password | ST_SoE_String | Passwort als Sercos-String. Wird zur Zeit noch nicht verwendet. Das Passwort muss mit FB_SoEWritePassword geschrieben werden. |
 | Die Idns können der entsprechenden Antriebsdokumentation entnommen werden. Für den AX5000 von Beckhoff siehe AX5000 Idn-Beschreibung. |
 Ein-/Ausgänge
Ein-/Ausgänge
VAR_IN_OUT
Axis : AXIS_REF;
END_VARName | Typ | Beschreibung |
|---|---|---|
Axis | Achsdatenstruktur, welche eine Achse eindeutig im System adressiert. Sie enthält unter anderem den aktuellen Status der Achse, wie Position, Geschwindigkeit oder Fehlerzustand. |
 Ausgänge
Ausgänge
VAR_OUTPUT
Busy : BOOL;
Error : BOOL;
AdsErrId : UINT;
SercosErrId : UINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
Busy | BOOL | Dieser Ausgang wird bei der Aktivierung des Funktionsbausteins gesetzt und bleibt gesetzt, bis eine Rückmeldung erfolgt. |
Error | BOOL | Dieser Ausgang wird gesetzt, nachdem der Busy-Ausgang zurückgesetzt wurde, wenn ein Fehler bei der Übertragung des Kommandos auftritt. |
AdsErrId | UINT | Liefert bei gesetztem Error-Ausgang den ADS-Fehlercode des zuletzt ausgeführten Befehls. |
SercosErrId | UDINT | Liefert bei gesetztem Error-Ausgang den Sercos-Fehler des zuletzt ausgeführten Befehls. |
Beispiel
fbWrite : FB_SoEWrite;
Idn : WORD;
Write : BOOL;
WriteValue : UINT;
Password : ST_SoE_String;
(* NcAxis *)
Axis : AXIS_REF;
IF Write THEN
Idn := S_0_IDNs + 33;
fbWrite(
Axis := Axis,
Idn := Idn,
Element := 16#40,
pSrcBuf := ADR(WriteValue),
BufLen := SIZEOF(WriteValue),
Password := Password,
Execute := TRUE,
Timeout := DEFAULT_ADS_TIMEOUT,
);
IF NOT fbWrite.Busy THEN
fbWrite(Axis := Axis, Execute := FALSE);
Write := FALSE;
END_IF
END_IF Parameterzugriff
Beim Parameterzugriff ist zu beachten, dass bei einigen Parametern die zusätzlichen Informationen über „ActualLength“ & „MaxLength“ für den Zugriff nötig sind.
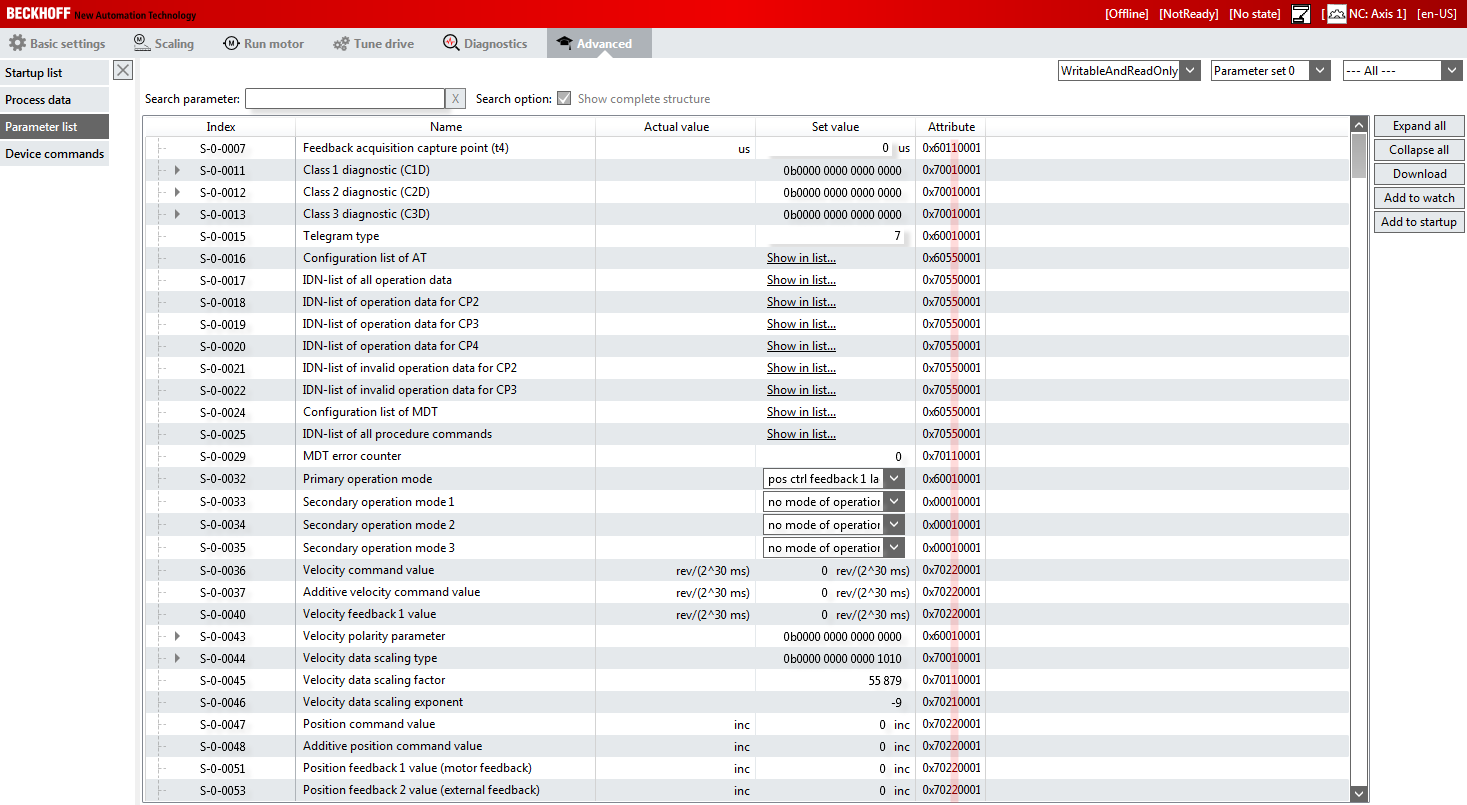
Um zu ermitteln, bei welchen Parametern dies notwendig ist, können in der Parameter-Liste des Drive-Managers über das Kontextmenu der Kopfzeile die Attribute eingeblendet werden.
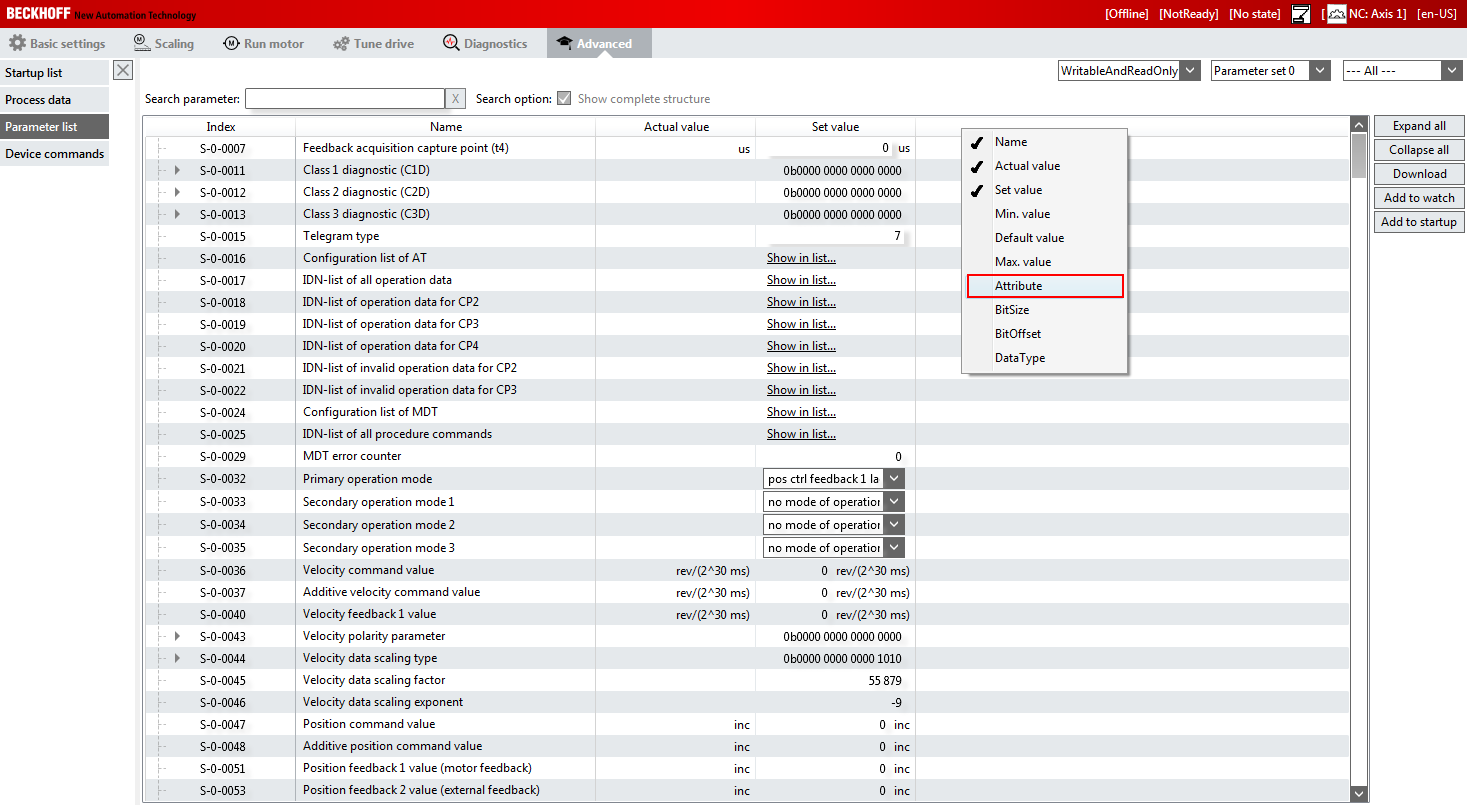
Enthält die 5. Stelle von rechts einen Wert 4,5,6 oder 7, so werden die zusätzlichen Informationen mit übertragen.
Die Struktur, um die Seriennummer (S-0-0432) auszulesen, siehe ST_SerialNumber.