Mechanische Lose
Als mechanische Lose wird das Spiel zwischen Antrieb und einem bewegten Maschinenteil oder zwischen einem Geber und einem bewegten Maschinenteil bezeichnet. Durch die mechanische Lose ergibt sich für ein bewegtes Maschinenteil eine Abweichung zwischen kommandierter Position und der tatsächlichen Istposition. Dies wirkt sich insbesondere bei der Bewegungsrichtungsumkehr aus.
Es wird bei der mechanischen Lose zwischen den nachfolgend erläuterten Arten unterschieden:
Positive Lose
Die positive Lose tritt bei Systemen auf, bei denen das Messsystem direkt mit dem Antrieb verbunden ist und die Lose zwischen Antrieb und bewegtem Maschinenteil auftritt. Bei einer Bewegungsrichtungsumkehr wird das Messsystem eine Positionsänderung detektieren, obwohl sich das Maschinenteil bedingt durch die Lose noch nicht bewegt. Dies führt dazu, dass das Maschinenteil nicht die kommandierte Position erreicht, sondern um den Betrag der Lose zu kurz verfährt, da der Geber, der indirekt die Position des Maschinenteils misst, der tatsächlichen Istposition des Maschinenteils vorauseilt.
In den folgenden Abbildungen wird eine Bewegung von links nach rechts als positive Fahrtrichtung (Normalfall) festgelegt.
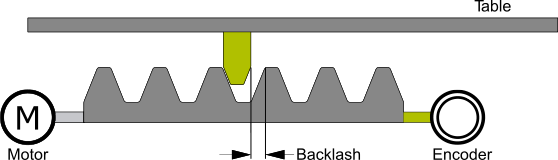
Der Geber eilt dem Maschinenteil (z. B. Tisch) voraus. Da damit auch die vom Geber erfasste Istposition der tatsächlichen Istposition des Tisches vorauseilt, fährt der Tisch zu kurz. Der Lose-Korrekturwert ist hier positiv einzugeben (= Normalfall).
Negative Lose
Die negative Lose tritt bei Systemen auf, bei denen die Lose zwischen dem bewegten Maschinenteil und dem Messsystem auftritt. Bei einer Bewegungsumkehr verfährt das Maschinenteil unmittelbar in die neue Richtung, ohne dass das Messsystem eine Positionsänderung detektiert. In diesem Fall verfährt das Maschinenteil um die Lose weiter als durch die Kommandierung erforderlich ist, da der Geber, der die Position des Maschinenteils direkt misst, der tatsächlichen Position des Maschinenteils nacheilt.
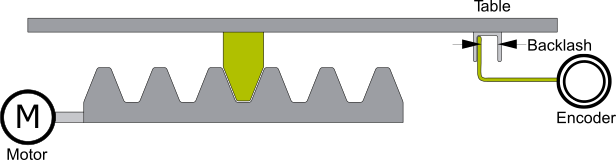
Der Geber hinkt dem Maschinenteil (z. B. Tisch) nach; der Tisch fährt zu weit. Der Korrekturwert ist negativ einzugeben.
Neutrale Lose
Die „neutrale Lose“ tritt als Sonderfall bei Systemen auf, bei denen das Messsystem am Werkstücktisch befestigt und direkt mit dem Antrieb verbunden ist. Die Lose tritt nun zwischen Antrieb und bewegtem Maschinenteil auf. Bei einer Bewegungsrichtungsumkehr wird diese Lose nun automatisch ausgefahren, da der Positionsregelkreis über das direkte Messsystem am Werkstücktisch geschlossen wird und die kommandierte Position erreicht wird, ohne besondere Maßnahmen der Losekompensation vorzunehmen.
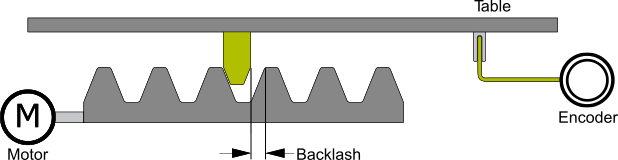
 | Für die Steuerung sind keinerlei besondere Einstellungen bezüglich Lose nötig, da der Lageregler, bezogen auf das am Werkstück montierte Gebersystem, eine stationäre Genauigkeit erzwingt. |
Allgemeine Hinweise und Anmerkungen:
- Bezüglich der Implementierung in TwinCAT existiert keine Unterscheidung zwischen positiver Lose und negativer Lose (außer dass sich für diese beiden Fälle das Vorzeichen der parametrierten Lose unterscheidet). Eine positive Lose wird als positiver Wert und eine negative Lose als negativer Wert parametriert.
- Der Fall der negativen Lose ist aus regelungstechnischer Sicht sehr ungünstig, da eine Achse mit einer Lose im Gebersystem nur sehr schwer regelbar ist („stationäre zyklische Schwingung“). Typischerweise sind zur Lösung dieses Problems weitere Maßnahmen nötig.
- Für all die verschiedenen Varianten der Lose gilt, dass nicht weiter zwischen Positionsinterface (Lageregung im Abtrieb) und Geschwindigkeitsinterface (Lageregelung in TwinCAT) unterschieden werden muss, da sich letztlich die gleiche Wirkung einstellt.
- Im Fall der „neutralen Lose“ sind, obwohl eine mechanische Lose vorliegt, keine weiteren Maßnahmen der Losekompensation nötig, da sich das Gebersystem am Werkstücktisch (Werkstück) befindet und somit eine stationäre Genauigkeit durch die Lageregelung auf diesen ergibt.
- Falls eine Referenzierung (Homing) einer Achse benötigt wird, dann sollte diese bei deaktivierter Losekompensation bzw. deaktivierter Positionskorrektur durchgeführt werden. Die letzte Fahrtrichtung beim Referenzierablauf legt durch das Setzen einer Referenzposition fest, ob als Bezugspunkt die linke oder die rechte Flanke verwendet wird (siehe NC-Implementierung der TwinCAT-Losekompensation (Backlash Compensation)).