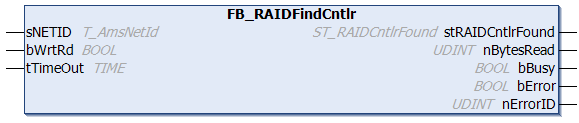
FB_RAIDFindCntlr
Diese Funktion gibt den Zählerstand des RAID-Controllers und die entsprechenden Controller-IDs zurück.
Hinweis | |
Der Funktionsbaustein sollte nur einmal in einem SPS-Programm aufgerufen werden! Die Systemperformance kann durch zyklisches Aufrufen dieses Funktionsblocks dramatisch beeinflusst werden. |
 Eingänge
Eingänge
VAR_INPUT
sNETID : T_AmsNetId;
bWrtRd : BOOL;
tTimeOut : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Typ | Beschreibung |
|---|---|---|
sNETID | T_AmsNetID | Ist ein String, der die AMS-Netzwerk-ID des Zielgerätes enthält, zu dem das ADS-Kommando geschickt wird. |
bWrtRd | BOOL | Das ADS-Kommando wird von der steigenden Flanke dieses Inputs getriggert. |
tTimeOut | TIME | Gibt die Timeout-Zeit an, die bei der Ausführung des Kommandos nicht überschritten werden darf. |
 Ausgänge
Ausgänge
VAR_OUTPUT
stRAIDCntlrFound : ST_RAIDCntlrFound;
nBytesRead : UDINT;
bBusy : BOOL;
bError : BOOL;
nErrorID : UDINT;
END_VARName | Typ | Beschreibung |
|---|---|---|
stRAIDCntlrFound | Enthält die Anzahl der gefundenen RAID-Controller und ihre RAID-Controller-Ids. | |
nBytesRead | UDINT | Anzahl der erfolgreich zurückgegebenen Datenbytes. |
bBusy | BOOL | Dieser Ausgang bleibt so lange TRUE, bis der Block ein Kommando ausgeführt hat, aber längstens für die Zeit, die am Timeout’-Input ansteht. Solange Busy = TRUE, wird kein neues Kommando an den Inputs angenommen werden. Bitte beachten Sie, dass es nicht die Ausführung des Dienstes ist, sondern die Zeit in der er ausgeführt werden darf, die hier gemonitort wird. |
bError | BOOL | Dieser Ausgang wird auf TRUE gesetzt, wenn ein Fehler während der Ausführung eines Kommandos auftritt. Der kommandospezifische Error-Code steht in ‘nErrorId’. Wenn der Block einen Timeout-Error hat, wird ‘bError’ auf TRUE gesetzt und ‘nErrorId’ ist 1861 (hexadezimal 0x745). Es wird auf FALSE gesetzt, wenn ein Kommando an den Eingängen ausgeführt wird. |
nErrorID | UDINT | Liefert bei einem gesetzten ERR-Ausgang die ADS-Fehlernummer. |
Voraussetzungen
|
Entwicklungsumgebung |
Zielplattform |
Einzubindende SPS-Bibliotheken (Kategoriegruppe) |
|---|---|---|
|
TwinCAT v3.1.0 |
PC oder CX (x86, x64, ARM) |
Tc2_IoFunctions (IO) |