Konfiguration
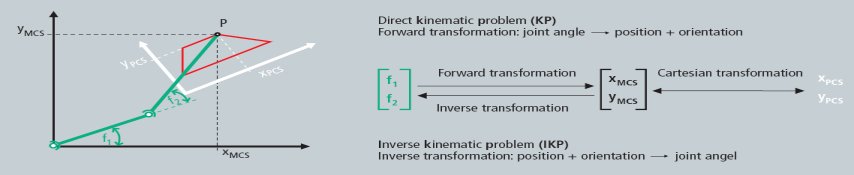
Basierend auf PLCopen unterscheiden wir zwischen zwei Hauptkoordinatensystemen:
- Achskoordinatensystem (ACS, „Axis Coordinate System“)
Die Achsen des ACS sind mit dem realen Motor verbunden. Dieses Koordinatensystem stellt also die Positionierung des Motors dar, ohne dass der Tool Center Point (TCP) berücksichtigt wird. - Maschinenkoordinatensystem (MCS, „Machine Coordinate System“)
Dieses ist standardmäßig ein kartesisches Koordinatensystem. Hier erfolgt im Allgemeinen die Programmierung von Bewegungen unter Verwendung der X-, Y- und Z-Achse. Die Rückwärtstransformation berechnet die Positionen für das Achskoordinatensystem. Die Achsen im Maschinenkoordinatensystem (MCS) sind reine Softwareachsen des Typs Simulationsencoder.
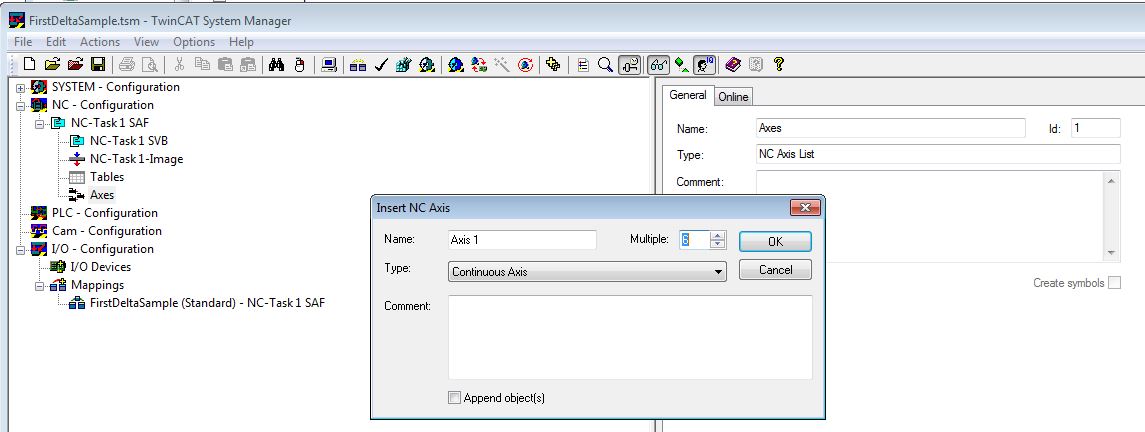
Alle ACS- und MCS-Achsen, die in einem kinematischen Transformationskanal verwendet werden, müssen im System Manager erzeugt werden. So hat z.B. ein Delta-Roboter 3 ACS-Achsen (M1...M3) und 3 MCS-Achsen (X, Y, Z).
Kinematischen Transformationskanal konfigurieren
- 1. Alle Achsen (ACS und MCS) zur NC-Konfiguration im System Manager hinzufügen, genau wie PTP-Achsen.
- 2. Einen Kinematikkanal zur System Manager Konfiguration hinzufügen.
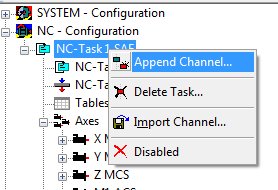
- Durch das Hinzufügen eines Kanals wird eine Instanz einer Kinematikgruppe erzeugt.
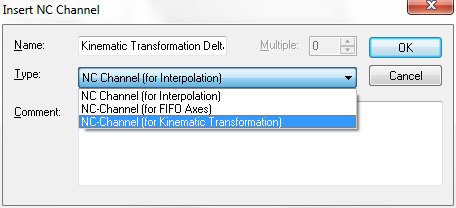
- 3. Den Kanaltyp auswählen: NC-Kanal (für Kinematic Transformation) um eine kinematische Transformation auszuführen.
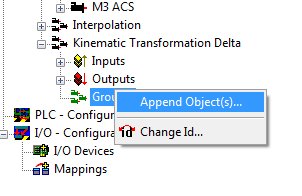
- 4. Die Objekte unter der Gruppe hinzufügen, die die kinematische Konfiguration des Benutzers darstellen.
- 5. Nach TcNcKin.tmc im TwinCAT\IO-Ordner suchen.
- 6. Zum Starten der Transformation für einen Delta-Roboter, wählen Sie z.B.
- Delta Typ 1
- Static-Trafo 6D (optionale MCS Verschiebung)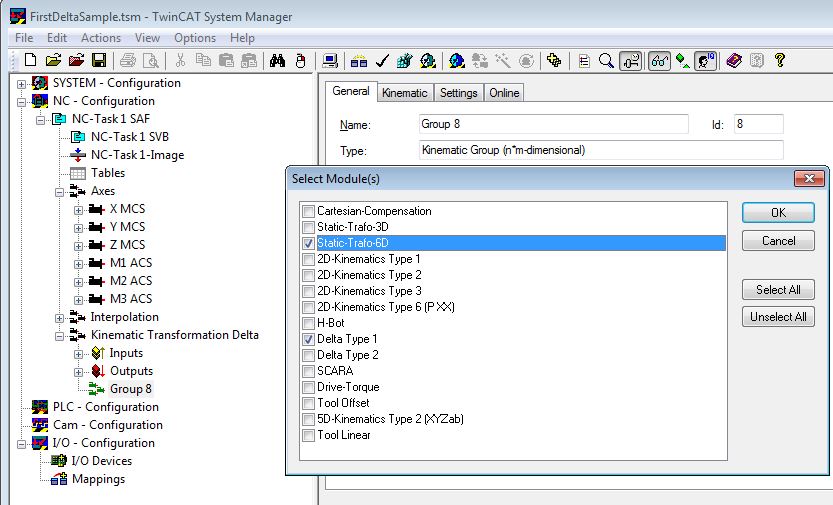
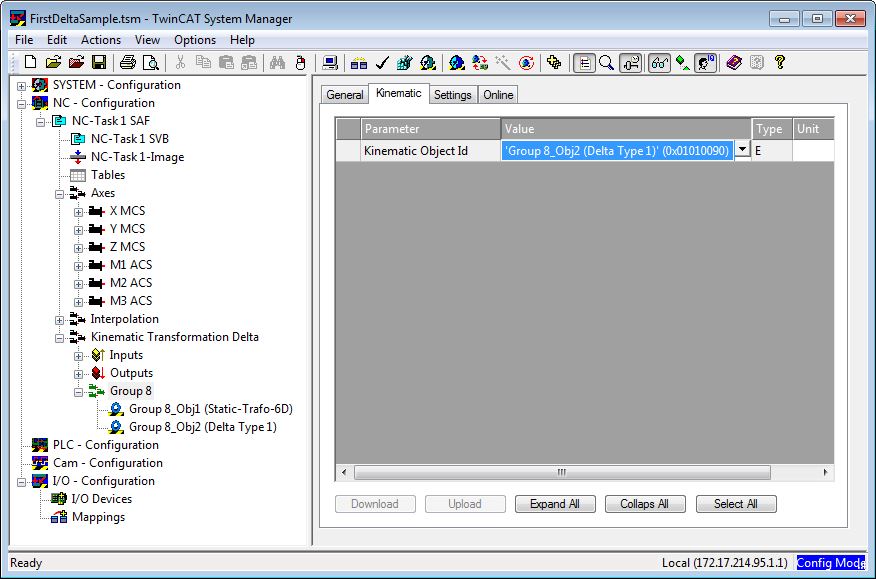
- 7. Die Transformationsgruppe muss wissen, welches Root-Modul aufzurufen ist. Deshalb muss die Objekt-ID der Kinematik (in diesem Fall Delta Type1) ausgewählt werden. Das Kinematik-Objekt definiert die Anzahl der in der SPS zu verwendenden ACS- und MCS-Achsen (siehe ST_KinAxes).
- 8. Die Objektparameter entsprechend der verwendeten Kinematik parametrieren.
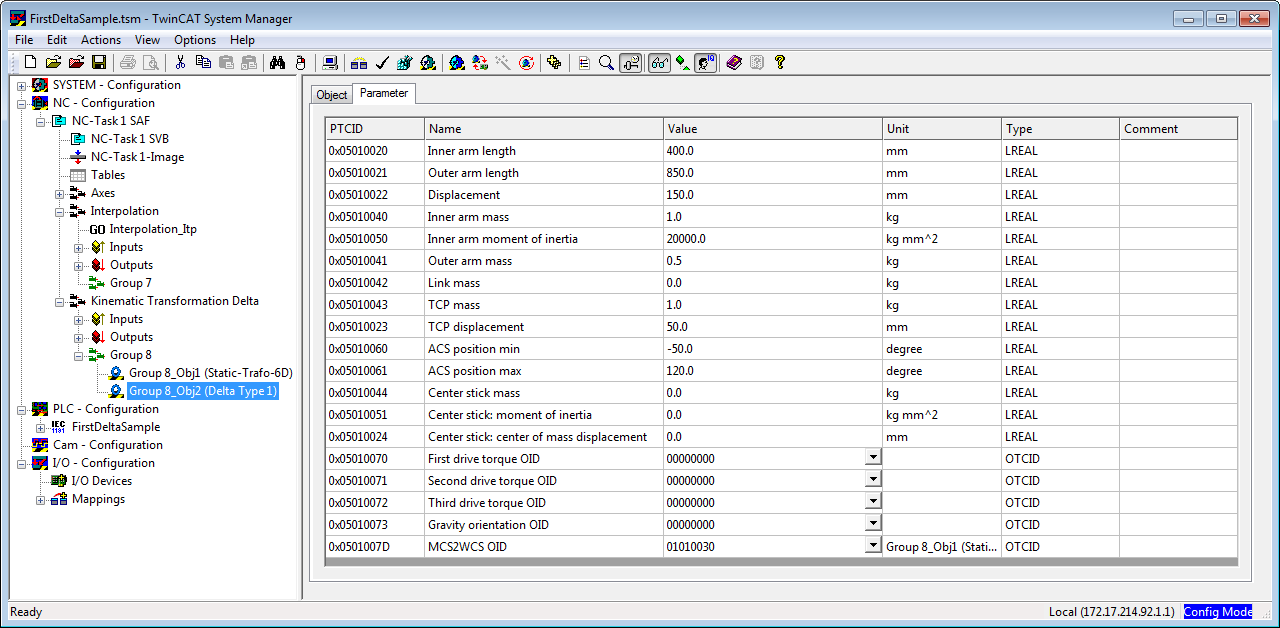
- Wenn das erledigt ist, ist die System Manager Konfiguration abgeschlossen.
- 9. Die Transformation kann jetzt von der SPS aus aktiviert werden (siehe SPS-Bibliothek). Zum Ansprechen der Transformation, ein zyklisches Kanalinterface in der SPS definieren und dieses mit den I/O des Kinematikkanals verknüpfen.
in_stKinToPlc AT %I* : NciChannelToPlc;
out_stPlcToKin AT %Q* : NciChannelFromPlc;