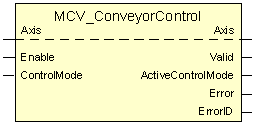
MCV_ConveyorControl
Mit dem FB MCV_ConveyorControl wird der dynamische Zustand einer Achse an den Motion Controller gemeldet, die nicht seiner Kontrolle unterliegt, weil diese Achse als Geberachse (siehe P-AXIS-00015) parametriert ist.
Mit dieser Information wird die Synchronisationsbewegung einer Achsgruppe beeinflusst, für die diese Geberachse als Masterachse parametriert wurde.
Blockdiagramm
Parameter des FB
VAR_IN_OUT | |||
| Axis | AXIS_REF | Achsreferenz |
VAR_INPUT | |||
| Enable | BOOL | TRUE, dynamischer Zustand der Geberachse wird an den Motion Controller übertragen. |
| ControlMode | UDINT | Legt den fest. Zulässige Werte am Eingang sind: 0: HLI_CONVEYOR_SPEED_CONST 1: HLI_CONVEYOR_ACCELERATION 2: HLI_CONVEYOR_DECELERATION 3: HLI_CONVEYOR_SPEED_ZERO |
VAR_OUTPUT | |||
| Valid | BOOL | TRUE, Wert an Ausgang |
| ActiveControlMode | UDINT | Aktueller dynamischer Zustand der Geberachse, der zum Motion Controller gemeldet wurde. |
| Error | BOOL | Ist TRUE, wenn ein Fehler im FB auftritt |
| ErrorID | WORD | Fehlerkennung |
Verhalten des FB:
- Diese Funktionalität steht nicht in allen Motion Controller Varianten zur Verfügung.
- In den Varianten in denen die Funktionalität zur Verfügung steht, müssen in der Achsparameterliste ([AXIS]) die Parameter der Gruppe conv_sync festgelegt werden und in der Kanalparameterliste ([CHAN]) die Parameter der Gruppe conveyor_sync gesetzt sein.