MCV_SetDriveMode
Mit dem FB MCV_SetDriveMode können unterschiedliche Betriebsarten eingestellt werden. Die möglichen Betriebsarten sind der untenstehenden Tabelle zu entnehmen.
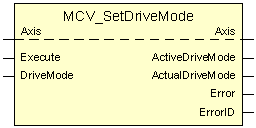
Blockdiagramm
Parameter des FB
| VAR_IN_OUT | |||
| Axis | AXIS_REF | Achsreferenz | |
VAR_INPUT | ||||
| Execute | BOOL | Durch die steigende Flanke des Eingangssignals wird in die angegebene Betriebsart gewechselt. | |
| DriveMode | INT | Derzeit unterstützte Betriebsarten:see "Extracted nested table 2" | |
(0) | Lageregelung | |||
(1) | Geschwindigkeitsregelung | |||
(2) | Momentenregelung | |||
(3) | Lageregelung mit Momentenvorsteuerung | |||
VAR_OUTPUT | ||||
| ActiveDriveMode | BOOL | Der FB MCV_SetDriveMode ist aktiv. | |
| ActualDriveMode | INT | Aktuelle Betriebsart. | |
| Error | BOOL | Ist TRUE, wenn ein Fehler im FB auftritt | |
| ErrorID | WORD | Fehlerkennung | |
Verhalten des FB:
- Damit während der Momentenregelung kein Schleppabstandsfehler auftritt, muss die Schleppabstandüberachwung deaktiviert werden (s. FB MCV_PosLagMonitor).
- Die Verwendung einer unzulässigen Betriebsart setzt den Ausgang „Error“ auf TRUE. „ErrorID“ erhält die Fehlerkennung 44049 (ERR_PO_AX_INVALID_DRIVE_MODE).
- Die Änderung der Betriebsart nach „TorqueControl“ erfolgt nur, wenn sich die Achse im Zustand „Standstill“ oder „Continuous Motion“ oder „Discrete Motion“ oder „Synchronized Motion“ befindet. Ist dies nicht Fall wird Ausgang „Error“ TRUE und „ErrorID“ = 44050 (ERR_PO_AX_TNA_TORQUE_CTRL_ACTIVE).
Sehen Sie dazu auch