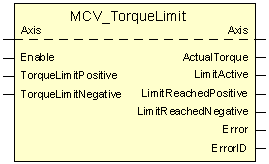
MCV_TorqueLimit
Der FB MCV_TorqueLimit begrenzt das maximale Drehmoment des Antriebs für jede Bewegungsrichtung unabhängig voneinander.
Blockdiagramm
Parameter des FB
VAR_IN_OUT | |||
| Axis | AXIS_REF | Achsreferenz |
VAR_INPUT | |||
| Enable | BOOL | Ist „Enable“ TRUE, ist die Drehmomentbegrenzung wirksam. |
| TorqueLimitPositive | INT | Maximales Drehmoment des Antriebs, das bei positiver Bewegungsrichtung auftreten darf. Standard-Einheit [0,1%] |
| TorqueLimitNegative | INT | Maximales Drehmoment des Antriebs, wenn das bei negativer Bewegungsrichtung auftreten darf. Standard-Einheit [0,1%] |
VAR_OUTPUT | |||
| ActualTorque | INT | Aktuell wirksames Drehmoment des Antriebs. Standard-Einheit [0,1%] |
| LimitActive | BOOL | Die Drehmomentbegrenzung ist aktiviert. |
| LimitReachedPositive | BOOL | Das maximale Drehmoment für die positive Bewegungsrichtung ist erreicht |
| LimitReachedNegative | BOOL | Das maximale Drehmoment für die negative Bewegungsrichtung ist erreicht |
| Error | BOOL | Ist TRUE, wenn ein Fehler im FB auftritt |
| ErrorID | WORD | Fehlerkennung |
Verhalten des FB:
- Die Beauftragung der Drehmomentbegrenzung kann immer dann erfolgen, wenn die ISG-MCP korrekt initialisiert wurde.
- Die Drehmomentbegrenzung ist für jede Bewegungsrichtung der Achse getrennt anzugeben. Wird kein Wert für die Drehmomentgrenze über die Eingänge „torque_limit_pos“ bzw. „torque_limit_neg“ angegeben, ist der Standardwert 100% durch den FB vorgegeben. Eingangswerte kleiner als 0% und Werte größer als 100% werden ohne weitere Rückmeldung auf 0% bzw. 100% umgesetzt.
- Zum Deaktivieren der Schleppabstandüberwachung wird der FB MVC_PosLagMonitor verwendet.
- Die Ausgänge „limit_reached_pos“ und „limit_reached_neg“ werden dann TRUE, wenn das aktuell wirkende Drehmoment mindestens 95% des Drehmoments entspricht, das über diesen FB beauftragt wurde.