KIN_TYP_36
Die Roboterkinematik besteht aus drei rotatorischen und einer translatorischen NC-Achse im Werkzeug. In die Z-Achse erfolgt der Werkzeuglängenverrechnung. Alle Rotationachsen sind C Achsen.
Achskonfiguration im NC-Kanal | ||
Achsbezeichner | X, Y, Z, C (C1, C2, Z, C3) | |
Achsindex | 0, 1, 2, 3 | |
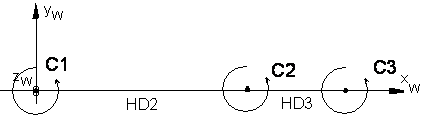
Kinematische Struktur | ||
| Werkzeugachsen | Werkstückachsen |
NC-Achsen | X,Y, Z, C | - |
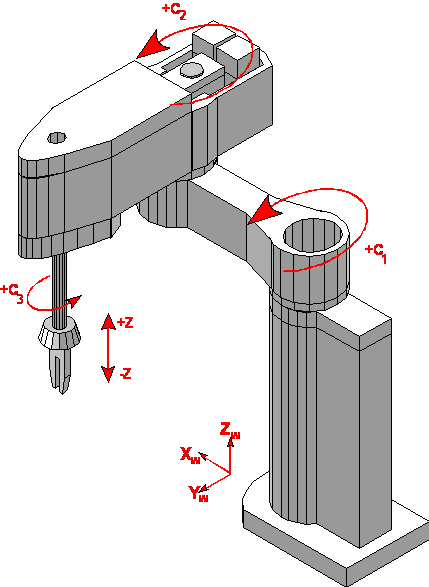
Abhängig von der Knickstellung des Robotergelenkes 2 (C2) arbeitet der SCARA als Links oder Rechtshänder. Die Maschinenachsstellung vor Anwahl der Transformation entscheidet also darüber ob der SCARA als Rechts- oder Linkshänder positioniert. Ein Wechsel zwischen Links- und Rechtshänder ist bei inaktiver kinematischer Transformation möglich.
Weiterführende Informationen