Registerkarte Settings
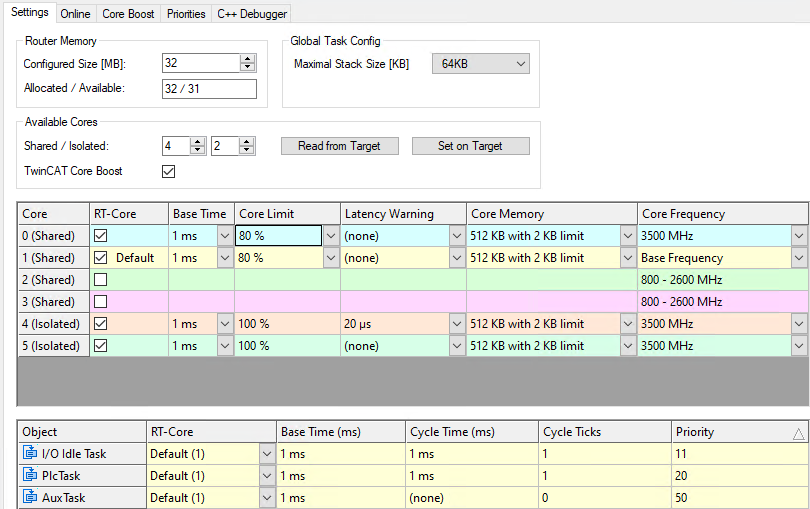
Router Memory (MByte) | Größe des Router-Speichers: Dient zum Einstellen der Größe des Router-Speichers (siehe auch Hinweis unter der Tabelle). |
Global Task Config/ Maximal Stack Size [KB] | Setzt die Stackgröße pro Task in Kilobyte. Diese Einstellung gilt für alle Echtzeit-Tasks im System. |
Available Cores (Shared/Isolated) | Anzahl verfügbarer Kerne (Windows-Kerne und isolierte Kerne) |
Read from Target | Liest die Anzahl verfügbaren Kerne vom Zielsystem oder vom lokalen System. |
Set on Target | Setzt die Einstellung bzgl. der Aufteilung zwischen geteilten und isolierten Kernen auf dem Zielsystem oder auf dem lokalen System. |
TwinCAT Core Boost | Verfügbar ab TwinCAT 3.1 Build 4026 Aktiviert das TwinCAT Feature Core Boost. Ist diese Funktion aktiv und wird vom aktuellen Zielsystem unterstützt, kann für jeden von TwinCAT verwendeten Echtzeitkern die Taktfrequenz fest definiert werden. Die Auswahl erfolgt in der Spalte Core Frequency. |
Core | Enthält die Nummer eines Kerns, die für den Betrieb der Runtime ausgewählt werden kann. In Klammern hinter der Nummer steht, ob es sich um einen geteilten oder isolierten Kern handelt. |
RT-Core | In der Spalte RT-Core der oberen Tabelle können Zeile für Zeile Kerne aus- und abgewählt werden. Die ausgewählten Kerne können dann in den Drop-down-Listen der Spalte RT-Core der unteren Tabelle ebenfalls ausgewählt werden. Auf diese Weise lässt sich eine Task in einer Zeile jeweils einem Kern zuordnen. |
Base Time | Basis-Takt des Kerns: Auswahlmöglichkeiten im Drop-down-Menü: keine Basiszeit, 1 ms, 500 µs, 333 µs, 250 µs, 200 µs, 125 µs, 100 µs, 83 µs, 3 µs, 76,9 µs, 71,4 µs, 66,6 µs, 62,5 µs und 50 µs. Wird der Wert der Basiszeit auf „(keine)“ gesetzt, dann ist es möglich, TwinCAT ohne Echtzeit zu benutzen. Ausführungen, die keine Echtzeit benötigen, wie AMS Router, TwinCAT Scope, ADS OCX, arbeiten ohne Einschränkungen weiter. Eine Ausführung von Echtzeittasks ist mit dieser Einstellung nicht möglich. |
Core Limit | Prozentualer Kernanteil, den die TwinCAT Echtzeit maximal belegt. Auswahlmöglichkeiten in der Drop-down-Liste: 10 %, 20 %, 30 %, 40 %, 50 %, 60 %, 70 %, 80 %, 90 % und 100%. Der Rest des CPU-Anteils wird auf geteilten Kernen garantiert für Betriebssystem und somit auch für Oberflächenprogramme reserviert. Der Wert „Core Limit“ kann sehr hoch eingestellt werden, weil automatisch zu Windows zurückgeschaltet wird, wenn die Echtzeittasks mit ihrem Zyklus fertig sind. |
Latency Warning | Die TwinCAT Echtzeit misst zyklisch die tatsächliche Länge der Basiszeit. Diese kann bedingt durch die PC-Architektur geringe Schwankungen gegenüber der eingestellten Basiszeit aufweisen. Im Drop-down-Menü kann eine Grenze eingestellt werden, bei deren Überschreitung vom TwinCAT-System eine Warnung erzeugt wird. Auswahlmöglichkeiten im Drop-down-Menü: „(keine)“, 20 µs, 50 µs, 100 µs, 200 µs, 250 µs und 500 µs. |
Core Memory | Größe des für diesen Kern reservierten Echtzeitspeichers |
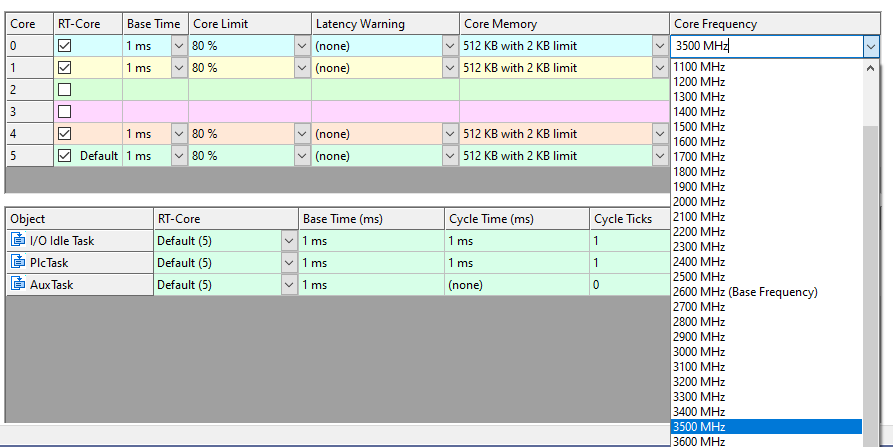
Core Frequency | Ist das TwinCAT Feature Core Boost aktiv und wird vom Zielsystem unterstützt, wird in dieser Spalte für jeden Echtzeitkern ein Drop-Down-Menü mit den möglichen Taktfrequenzen angezeigt, die für diesen Kern eingestellt werden können. Ist diese Funktion deaktiviert, wird in dieser Spalte Base Frequency angezeigt. |
Object | Name des TwinCAT-Objekts, das zyklisch aufgerufen wird. |
Cycle Time (ms) | Zykluszeiten der Tasks |
Cycle Ticks | Anzahl Ticks in einem Zyklus |
Priority | Priorität der jeweiligen Task im TwinCAT-System: Je kleiner die hier angegebene Zahl ist, desto höher ist die Priorität der Task innerhalb des TwinCAT-Systems. |
Router-Speicher:
TwinCAT 3.1 Versionen bis einschließlich Build 4024:
Es gibt einen globalen Echtzeitspeicher, der für die ADS-Kommunikation und für Speicheranfragen aus der Echtzeit heraus verwendet wird. Die Größe des Speichers kann über die oben genannte Option im System Manager definiert werden und wird nach einem Neustart des Rechners aktiv.
TwinCAT 3.1 ab Build 4026:
Der Router verwendet für die ADS-Kommunikation zwischen den Teilnehmern und für Speicheranfragen aus der Echtzeit jeweils getrennte Speicherbereiche. Der Speicherbereich für Anfragen aus der Echtzeit kann über die oben genannte Option im System Manager eingestellt werden und wird beim Aktivieren der Solution aktiv. Der ADS-Kommunikationsspeicher wird beim Booten des Systems erstellt und entspricht ca. 25 % der Größe des bis dahin eingestellten Speichers für Echtzeitanfragen. Die Größe wird zwischen 4 MB und 32 MB begrenzt. Dieser Speicher bleibt bis zum nächsten Neustart des Systems permanent bestehen.
Isolierte Kerne:
In TwinCAT 3.1 ist es möglich Kerne zu isolieren. Die isolierten Kerne sind dem Gast-Betriebssystem dann nicht mehr bekannt, so dass auf diesen Kernen nur Echtzeit-Tasks ausgeführt werden (siehe Kapitel Grundlagen -> Echtzeit). Ab den Intel® Prozessorgenerationen 12./ 13. mit einer Bios-Version 0.14 und einer TwinCAT 3.1 Version 4026.18 oder neuer ist es möglich zu unterschieden, ob Efficiency- oder Performance-Kerne isoliert werden.
TwinCAT Core Boost
 | Voraussetzung: Sowohl die Engineering-Umgebung als auch die Laufzeitumgebung müssen mindestens eine TwinCAT-Version 3.1.4026.6 verwenden. |
Wird das TwinCAT Feature Core Boost für ein Zielsystem unterstützt und ist aktiv, wird dies nach dem Betätigen des Buttons Read from Target in der Auswahlbox TwinCAT Core Boost angezeigt. Zum Aktivieren oder Deaktivieren der Funktion muss diese Einstellungen durch den Button Set on Target auf dem Zielsystem aktiviert werden. Nach dem Ändern dieser Einstellung muss ein Neustart des Rechners erfolgen.
Wird die TwinCAT Core Boost Funktion von einem Zielsystem nicht unterstützt, erscheint nach dem Betätigen des Buttons Set on Target die folgende Mitteilung:
Ist die Einstellung TwinCAT Core Boost gesetzt, ist es möglich für jeden Echtzeitkern eine Taktfrequenz zu definieren. Wird für einen Echtzeitkern keine Taktfrequenz definiert, wird automatisch die Base Frequency ausgewählt.
| Richtige Auswahl der Core Frequency TwinCAT überwacht automatisch die Taktfrequenzen der einzelnen Kerne anhand der im System hinterlegten Grenzwerte für die Temperatur der einzelnen Kerne bzw. des Stromverbrauchs der einzelnen Packages. Werden diese Grenzen überschritten, regelt TwinCAT die Taktfrequenzen der einzelnen Kerne entsprechend runter (siehe auch Kapitel Registerkarte Core Boost). Wird TwinCAT gezwungen die Taktfrequenzen von einzelnen Echtzeitkernen herunterzuregeln, kann dies u. U. Einfluss auf das in TwinCAT eingestellte Echtzeitverhalten haben. Die auf diesem Echtzeitkern ausgeführten Tasks haben dann längere Ausführungszeiten, was u. U. zu Zykluszeitüberschreitungen führen kann. Sie sind daher mitverantwortlich die Taktfrequenzen der Echtzeitkerne so zu wählen, dass TwinCAT nicht dauerhaft im Throttling (heruntergeregelt) betrieben wird. Ein dauerhaftes Überschreiten der Grenztemperatur kann dazu führen, dass sich das System abschaltet. |
| Auswahl der Taktfrequenz für Nichtechtzeitkerne Nichtechtzeitkerne sind Rechnerkerne, auf denen TwinCAT nicht aktiviert ist und die nicht in der Echtzeit verwendet werden, so dass dort nur vom Betriebssystem angestoßene Prozesse ausgeführt werden. Für die Nichtechtzeitkerne wird die Taktfrequenz vom Betriebssystem je nach Bedarf automatisch ausgewählt. Die maximale Taktfrequenz bis zu der Nichtechtzeitkerne hochtakten können, ist die Basisfrequenz. Ab den Intel® Prozessoren der 12./ 13. Generation ist es für Nichtechtzeitkerne möglich, dass diese bei Bedarf die Taktfrequenz bis zur Core-Boost-Frequenz übertakten. Die Höhe der Core-Boost-Frequenz ist im System hinterlegt und unterscheidet sich je nach Prozessortyp. |
Konfigurierbare Taktfrequenzen:
Prozessor | Prozessorgeneration | Basistakt | Konfigurierbarer Core Boost Takt |
|---|---|---|---|
Core i3-11100HE | Intel® Core™ der 11. Generation | 2,40 GHz | 4,00 GHz |
Core i5-11500HE | Intel® Core™ der 11. Generation | 2,60 GHz | 4,10 GHz |
Core i7-11850HE | Intel® Core™ der 11. Generation | 2,60 GHz | 4,20 GHz |
Core i3-13100E | Intel® Core™ der 13. Generation | 3,30 GHz | 4,20 GHz |
Core i5-13400E | Intel® Core™ der 13. Generation | 2,40 GHz | 4,10 GHz |
Core i7-13700E | Intel® Core™ der 13. Generation | 1,90 GHz | 4,00 GHz |
Core i9-13900E | Intel® Core™ der 13. Generation | 1,80 GHz | 3,90 GHz |
Besondere Tasks:
I/O-Idle-Task:
Die I/O-Idle-Task führt die asynchronen Mappings aus und ist zudem verantwortlich für die azyklische Kommunikation mit den EtherCAT-Teilnehmern (z.B. Schreiben von Parametern).
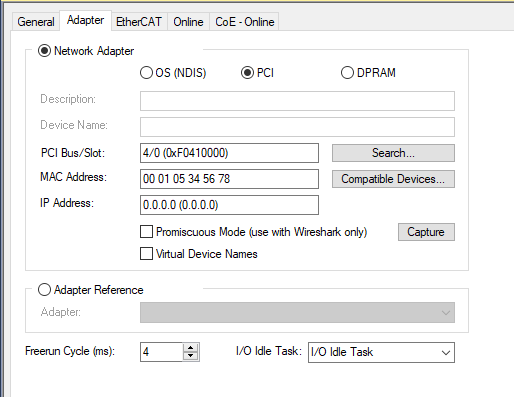
Ab der TwinCAT 3.1 Version 3.1.4026 kann es für jeden EtherCAT-Master eine eigene I/O-Idle-Task geben. Diese können Sie in den Adaptereinstellungen eines EtherCAT-Masters im Auswahlfeld I/O Idle Task auswählen.
PlcAuxTask:
Die PlcAuxTask dient der Kommunikation zwischen den SPS-Editoren und den SPS-Laufzeitmodulen. Dies beinhaltet den Download und den Online-Change von SPS-Steuerungscode ebenso wie das Debugging (Monitoring von Werten, Setzen von Breakpoints, etc.). Darüber hinaus verarbeitet die PlcAuxtask auch die ADS-Nachrichten, die unabhängig von der Entwicklungsumgebung (TcXaeShell) an das Laufzeitsystem gesendet werden (z. B. von einer HMI).