TwinCAT 2
Startup
TwinCAT 2 verwendet grundlegend zwei Benutzeroberflächen: den „TwinCAT System Manager“ zur Kommunikation mit den elektromechanischen Komponenten und „TwinCAT PLC Control“ für die Erstellung und Kompilierung einer Steuerung. Begonnen wird zunächst mit der Anwendung des TwinCAT System Managers.
Nach erfolgreicher Installation des TwinCAT-Systems auf den Anwender-PC der zur Entwicklung verwendet werden soll, zeigt der TwinCAT 2 (System Manager) folgende Benutzeroberfläche nach dem Start:
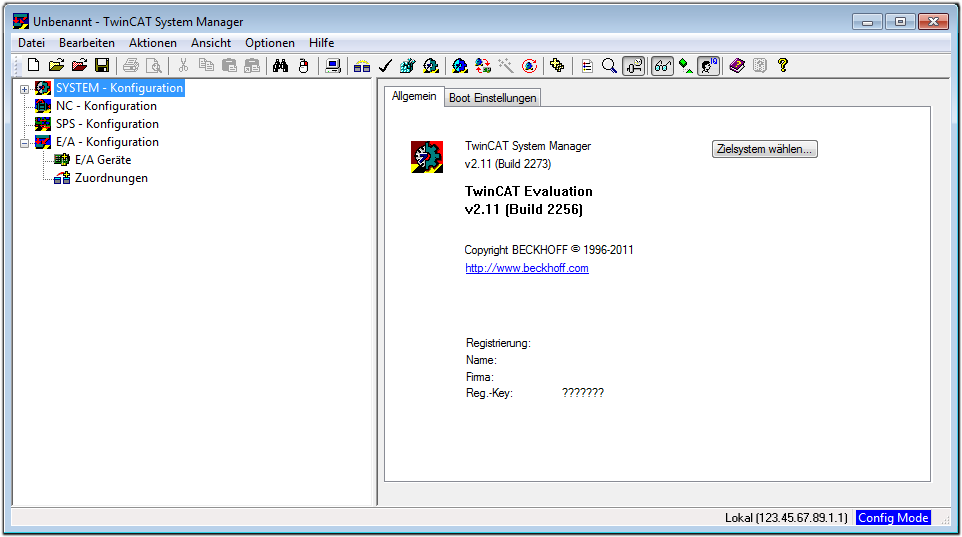 Abb.44: Initiale Benutzeroberfläche TwinCAT 2
Abb.44: Initiale Benutzeroberfläche TwinCAT 2Es besteht generell die Möglichkeit das TwinCAT „lokal“ oder per „remote“ zu verwenden. Ist das TwinCAT System inkl. Benutzeroberfläche (Standard) auf dem betreffenden PLC installiert, kann TwinCAT „lokal“ eingesetzt werden und mit Schritt „Geräte einfügen“ fortgesetzt werden.
Ist es vorgesehen, die auf einem PLC installierte TwinCAT Laufzeitumgebung von einem anderen System als Entwicklungsumgebung per „remote“ anzusprechen, ist das Zielsystem zuvor bekannt zu machen. Im Menü unter „Aktionen“ → „Auswahl des Zielsystems...“, über das Symbol „ “ oder durch Taste „F8“ wird folgendes Fenster hierzu geöffnet:
“ oder durch Taste „F8“ wird folgendes Fenster hierzu geöffnet:
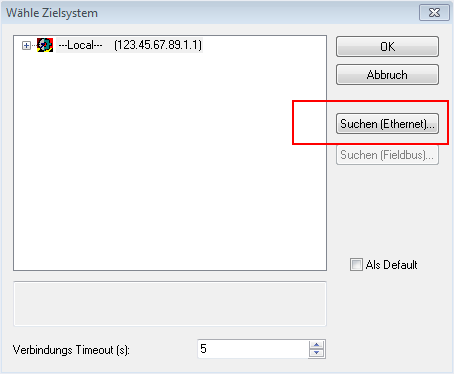 Abb.45: Wähle Zielsystem
Abb.45: Wähle ZielsystemMittels „Suchen (Ethernet)...“ wird das Zielsystem eingetragen. Dadurch wird ein weiterer Dialog geöffnet um hier entweder:
- den bekannten Rechnernamen hinter „Enter Host Name / IP:“ einzutragen (wie rot gekennzeichnet)
- einen „Broadcast Search“ durchzuführen (falls der Rechnername nicht genau bekannt)
- die bekannte Rechner - IP oder AmsNetId einzutragen
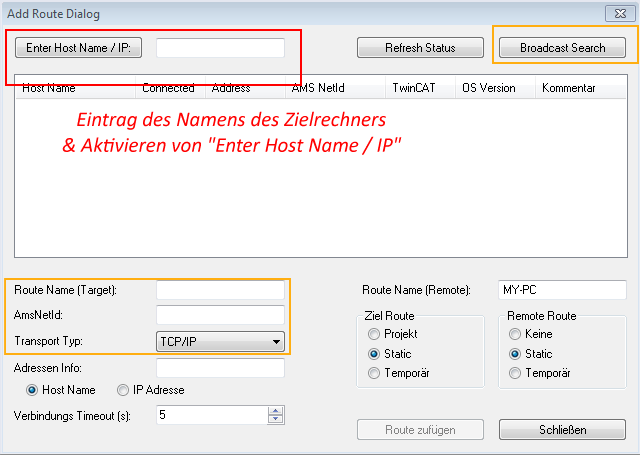 Abb.46: PLC für den Zugriff des TwinCAT System Managers festlegen: Auswahl des Zielsystems
Abb.46: PLC für den Zugriff des TwinCAT System Managers festlegen: Auswahl des ZielsystemsIst das Zielsystem eingetragen steht dieses wie folgt zur Auswahl (ggf. muss zuvor das korrekte Passwort eingetragen werden):

Nach der Auswahl mit „OK“ ist das Zielsystem über den System Manager ansprechbar.
Geräte einfügen
In dem linksseitigen Konfigurationsbaum der TwinCAT 2 – Benutzeroberfläche des System Managers wird „E/A-Geräte“ selektiert und sodann entweder über Rechtsklick ein Kontextmenü geöffnet und „Geräte Suchen…“ ausgewählt oder in der Menüleiste mit  die Aktion gestartet. Ggf. ist zuvor der TwinCAT System Manager in den „Konfig Modus“ mittels
die Aktion gestartet. Ggf. ist zuvor der TwinCAT System Manager in den „Konfig Modus“ mittels  oder über das Menü
oder über das Menü
„Aktionen“ → „Startet/Restarten von TwinCAT in Konfig-Modus“(Shift + F4) zu versetzen.
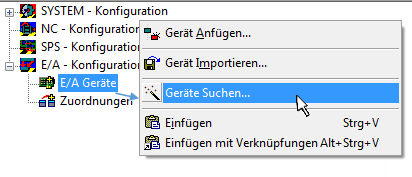 Abb.47: Auswahl „Gerät Suchen...“
Abb.47: Auswahl „Gerät Suchen...“Die darauffolgende Hinweismeldung ist zu bestätigen und in dem Dialog die Geräte „EtherCAT“ zu wählen:
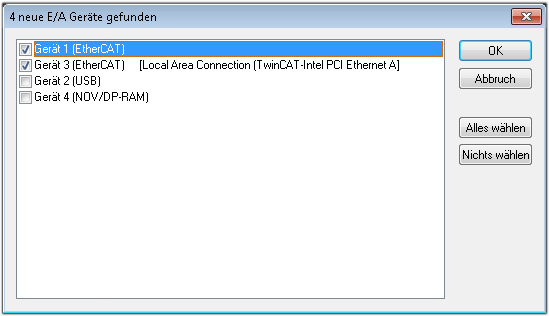 Abb.48: Automatische Erkennung von E/A-Geräten: Auswahl der einzubindenden Geräte
Abb.48: Automatische Erkennung von E/A-Geräten: Auswahl der einzubindenden GeräteEbenfalls ist anschließend die Meldung „nach neuen Boxen suchen“ zu bestätigen, um die an den Geräten angebundenen Klemmen zu ermitteln. „Free Run“ erlaubt das Manipulieren von Ein- und Ausgangswerten innerhalb des „Config Modus“ und sollte ebenfalls bestätigt werden.
Ausgehend von der am Anfang dieses Kapitels beschriebenen Beispielkonfiguration sieht das Ergebnis wie folgt aus:
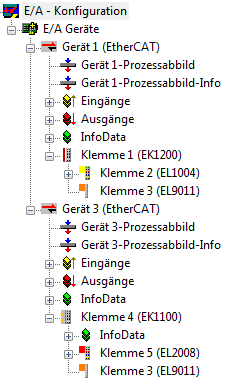 Abb.49: Abbildung der Konfiguration im TwinCAT 2 System Manager
Abb.49: Abbildung der Konfiguration im TwinCAT 2 System ManagerDer gesamte Vorgang setzt sich aus zwei Stufen zusammen, die auch separat ausgeführt werden können (erst das Ermitteln der Geräte, dann das Ermitteln der daran befindlichen Elemente wie Box-Module, Klemmen o. ä.). So kann auch durch Markierung von „Gerät ...“ aus dem Kontextmenü eine „Suche“ Funktion (Scan) ausgeführt werden, die hierbei dann lediglich die darunter liegenden (im Aufbau vorliegenden) Elemente einliest:
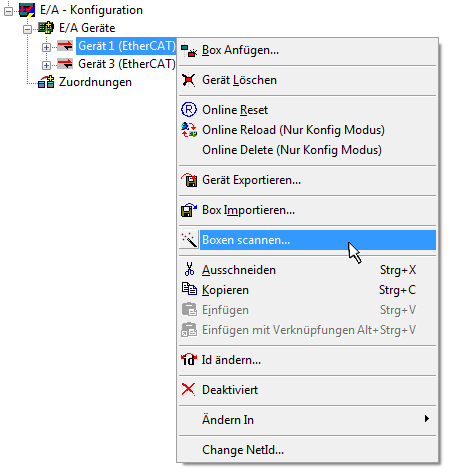 Abb.50: Einlesen von einzelnen an einem Gerät befindlichen Klemmen
Abb.50: Einlesen von einzelnen an einem Gerät befindlichen KlemmenDiese Funktionalität ist nützlich, falls die Konfiguration (d. h. der „reale Aufbau“) kurzfristig geändert wird.
PLC programmieren und integrieren
TwinCAT PLC Control ist die Entwicklungsumgebung zur Erstellung der Steuerung in unterschiedlichen Programmumgebungen: Das TwinCAT PLC Control unterstützt alle in der IEC 61131-3 beschriebenen Sprachen. Es gibt zwei textuelle Sprachen und drei grafische Sprachen.
- Textuelle Sprachen
- Anweisungsliste (AWL, IL)
- Strukturierter Text (ST)
- Grafische Sprachen
- Funktionsplan (FUP, FBD)
- Kontaktplan (KOP, LD)
- Freigrafischer Funktionsplaneditor (CFC)
- Ablaufsprache (AS, SFC)
Für die folgenden Betrachtungen wird lediglich vom strukturierten Text (ST) Gebrauch gemacht.
Nach dem Start von TwinCAT PLC Control wird folgende Benutzeroberfläche für ein initiales Projekt dargestellt:
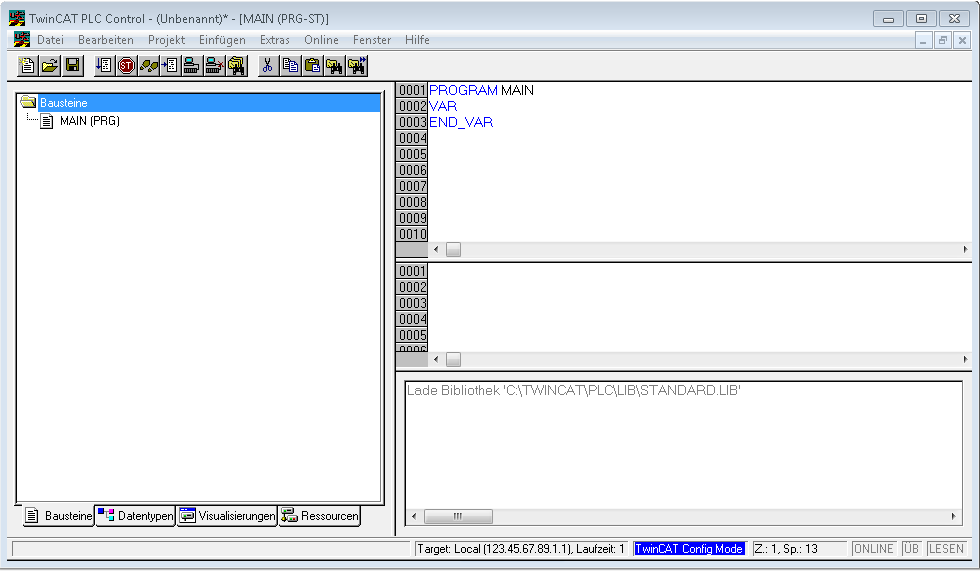 Abb.51: TwinCAT PLC Control nach dem Start
Abb.51: TwinCAT PLC Control nach dem StartNun sind für den weiteren Ablauf Beispielvariablen sowie ein Beispielprogramm erstellt und unter dem Namen „PLC_example.pro“ gespeichert worden:
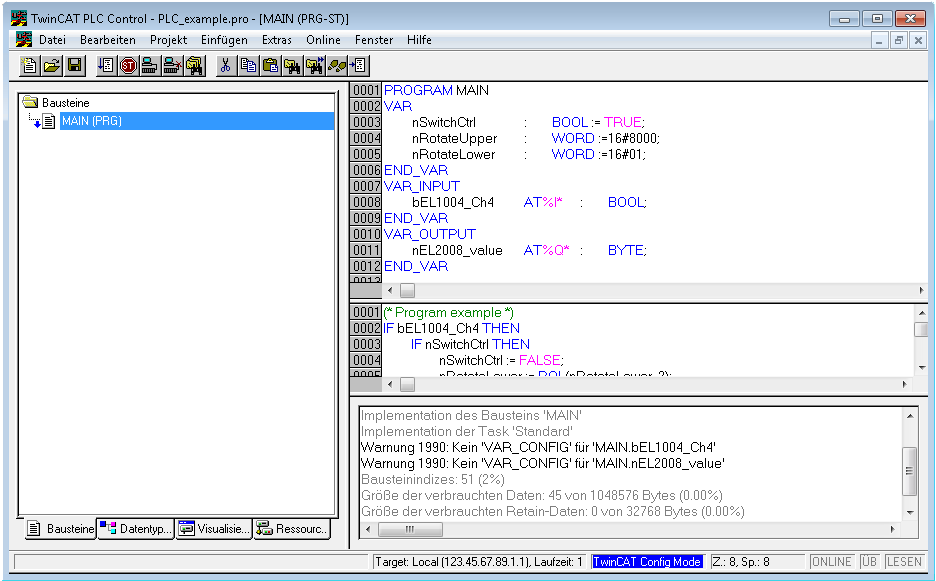 Abb.52: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung)
Abb.52: Beispielprogramm mit Variablen nach einem Kompiliervorgang (ohne Variablenanbindung)Die Warnung 1990 (fehlende „VAR_CONFIG“) nach einem Kompiliervorgang zeigt auf, dass die als extern definierten Variablen (mit der Kennzeichnung „AT%I*“ bzw. „AT%Q*“) nicht zugeordnet sind. Das TwinCAT PLC Control erzeugt nach erfolgreichen Kompiliervorgang eine „*.tpy“ Datei in dem Verzeichnis, in dem das Projekt gespeichert wurde. Diese Datei („*.tpy“) enthält u.a. Variablenzuordnungen und ist dem System Manager nicht bekannt, was zu dieser Warnung führt. Nach dessen Bekanntgabe kommt es nicht mehr zu dieser Warnung.
Im System Manager ist das Projekt des TwinCAT PLC Control zunächst einzubinden. Dies geschieht über das Kontext Menü der „SPS-Konfiguration“ (rechts-Klick) und der Auswahl „SPS-Projekt Anfügen…“:
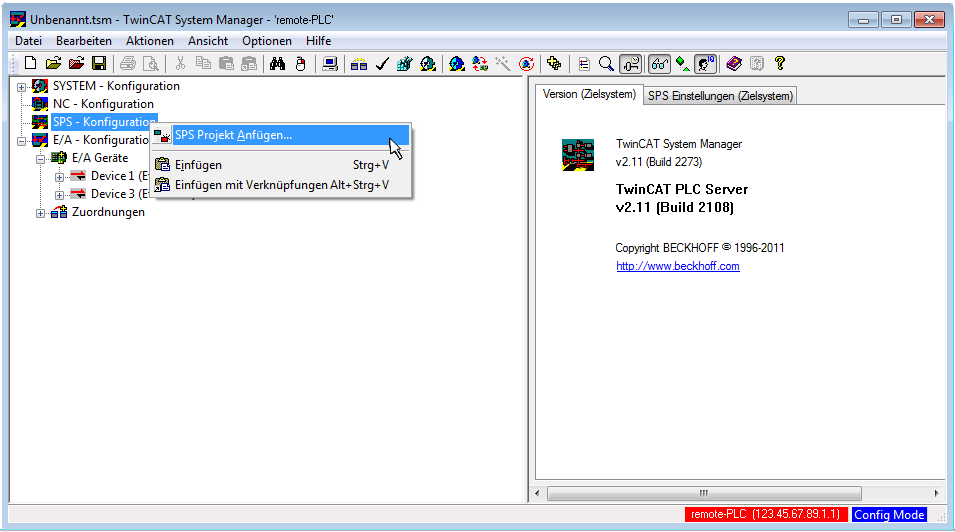 Abb.53: Hinzufügen des Projektes des TwinCAT PLC Control
Abb.53: Hinzufügen des Projektes des TwinCAT PLC ControlÜber ein dadurch geöffnetes Browserfenster wird die PLC-Konfiguration „PLC_example.tpy“ ausgewählt. Dann ist in dem Konfigurationsbaum des System Managers das Projekt inklusive der beiden „AT“–gekennzeichneten Variablen eingebunden:
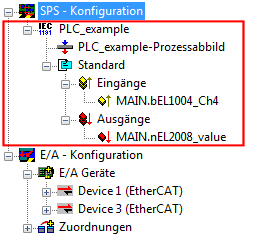 Abb.54: Eingebundenes PLC-Projekt in der SPS-Konfiguration des System Managers
Abb.54: Eingebundenes PLC-Projekt in der SPS-Konfiguration des System ManagersDie beiden Variablen „bEL1004_Ch4“ sowie „nEL2008_value“ können nun bestimmten Prozessobjekten der E/A-Konfiguration zugeordnet werden.
Variablen Zuordnen
Über das Kontextmenü einer Variable des eingebundenen Projekts „PLC_example“ unter „Standard“ wird mittels „Verknüpfung Ändern…“ ein Fenster zur Auswahl eines passenden Prozessobjektes (PDOs) geöffnet:
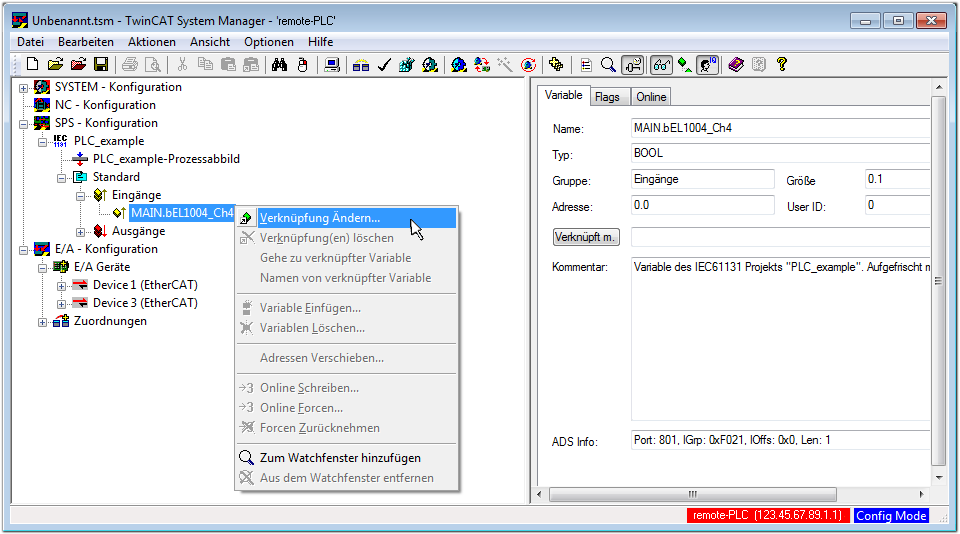 Abb.55: Erstellen der Verknüpfungen PLC-Variablen zu Prozessobjekten
Abb.55: Erstellen der Verknüpfungen PLC-Variablen zu ProzessobjektenIn dem dadurch geöffneten Fenster kann aus dem SPS-Konfigurationsbaum das Prozessobjekt für die Variable „bEL1004_Ch4“ vom Typ BOOL selektiert werden:
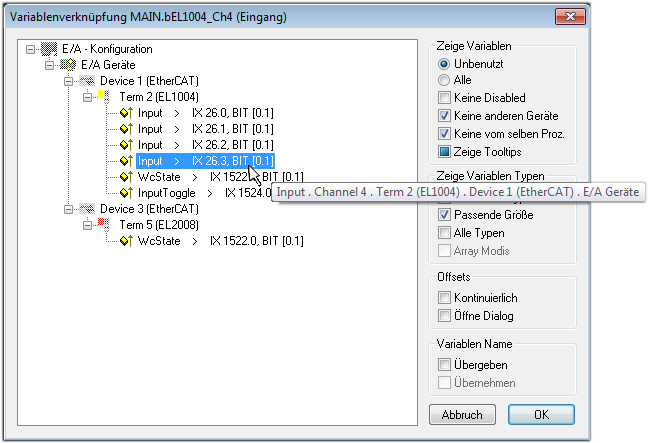 Abb.56: Auswahl des PDO vom Typ BOOL
Abb.56: Auswahl des PDO vom Typ BOOLEntsprechend der Standarteinstellungen stehen nur bestimmte PDO-Objekte zur Auswahl zur Verfügung. In diesem Beispiel wird von der Klemme EL1004 der Eingang von Kanal 4 zur Verknüpfung ausgewählt. Im Gegensatz hierzu muss für das Erstellen der Verknüpfung der Ausgangsvariablen die Checkbox „Alle Typen“ aktiviert werden, um in diesem Fall eine Byte-Variable einen Satz von acht separaten Ausgangsbits zuzuordnen. Die folgende Abbildung zeigt den gesamten Vorgang:
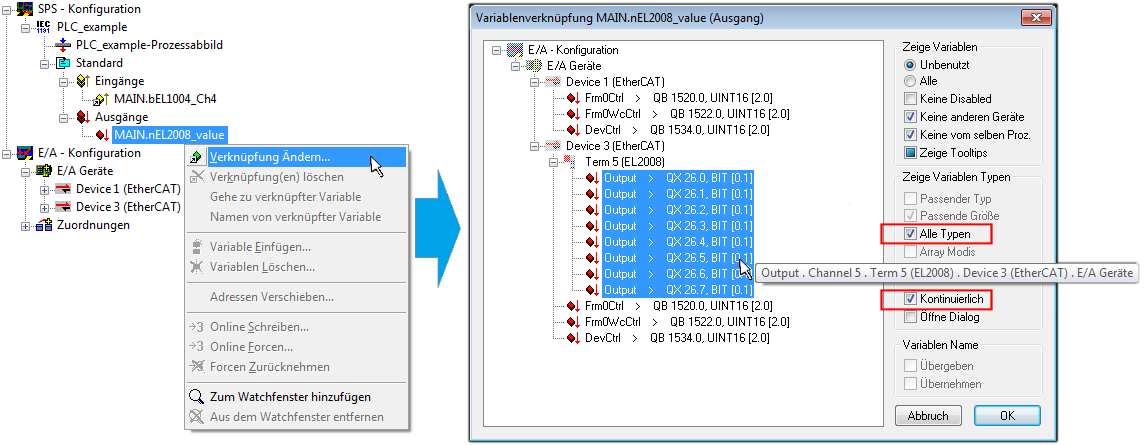 Abb.57: Auswahl von mehreren PDO gleichzeitig: Aktivierung von „Kontinuierlich“ und „Alle Typen“
Abb.57: Auswahl von mehreren PDO gleichzeitig: Aktivierung von „Kontinuierlich“ und „Alle Typen“Zu sehen ist, dass überdies die Checkbox „Kontinuierlich“ aktiviert wurde. Dies ist dafür vorgesehen, dass die in dem Byte der Variablen „nEL2008_value“ enthaltenen Bits allen acht ausgewählten Ausgangsbits der Klemme EL2008 der Reihenfolge nach zugeordnet werden sollen. Damit ist es möglich, alle acht Ausgänge der Klemme mit einem Byte entsprechend Bit 0 für Kanal 1 bis Bit 7 für Kanal 8 von der PLC im Programm später anzusprechen. Ein spezielles Symbol ( ) an dem gelben bzw. roten Objekt der Variablen zeigt an, dass hierfür eine Verknüpfung existiert. Die Verknüpfungen können z. B. auch überprüft werden, indem „Goto Link Variable“ aus dem Kontextmenü einer Variable ausgewählt wird. Dann wird automatisch das gegenüberliegende verknüpfte Objekt, in diesem Fall das PDO selektiert:
) an dem gelben bzw. roten Objekt der Variablen zeigt an, dass hierfür eine Verknüpfung existiert. Die Verknüpfungen können z. B. auch überprüft werden, indem „Goto Link Variable“ aus dem Kontextmenü einer Variable ausgewählt wird. Dann wird automatisch das gegenüberliegende verknüpfte Objekt, in diesem Fall das PDO selektiert:
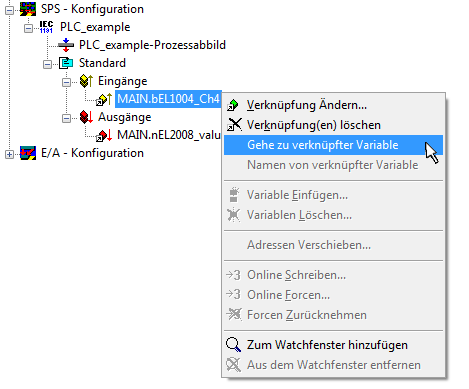 Abb.58: Anwendung von „Goto Link Variable“ am Beispiel von „MAIN.bEL1004_Ch4“
Abb.58: Anwendung von „Goto Link Variable“ am Beispiel von „MAIN.bEL1004_Ch4“Anschließend wird mittels Menüauswahl „Aktionen“ → „Zuordnung erzeugen…“ oder über  der Vorgang des Zuordnens von Variablen zu PDO abgeschlossen.
der Vorgang des Zuordnens von Variablen zu PDO abgeschlossen.
Dies lässt sich entsprechend in der Konfiguration einsehen:

Der Vorgang zur Erstellung von Verknüpfungen kann auch in umgekehrter Richtung, d. h. von einzelnen PDO ausgehend zu einer Variablen erfolgen. In diesem Beispiel wäre dann allerdings eine komplette Auswahl aller Ausgangsbits der EL2008 nicht möglich, da die Klemme nur einzelne digitale Ausgänge zur Verfügung stellt. Hat eine Klemme ein Byte, Word, Integer oder ein ähnliches PDO, so ist es möglich dies wiederum einen Satz von bit-typisierten Variablen zuzuordnen. Auch hier kann ebenso in die andere Richtung ein „Goto Link Variable“ ausgeführt werden, um dann die betreffende Instanz der PLC zu selektieren.
Aktivieren der Konfiguration
Die Zuordnung von PDO zu PLC-Variablen hat nun die Verbindung von der Steuerung zu den Ein- und Ausgängen der Klemmen hergestellt. Nun kann die Konfiguration aktiviert werden. Zuvor kann mittels  (oder über „Aktionen“ → „Konfiguration überprüfen…“) die Konfiguration überprüft werden. Falls kein Fehler vorliegt, kann mit
(oder über „Aktionen“ → „Konfiguration überprüfen…“) die Konfiguration überprüft werden. Falls kein Fehler vorliegt, kann mit  (oder über „Aktionen“ → „Aktiviert Konfiguration…“) die Konfiguration aktiviert werden, um dadurch Einstellungen im System Manger auf das Laufzeitsystem zu übertragen. Die darauffolgenden Meldungen „Alte Konfigurationen werden überschrieben!“ sowie „Neustart TwinCAT System in Run Modus“ werden jeweils mit „OK“ bestätigt.
(oder über „Aktionen“ → „Aktiviert Konfiguration…“) die Konfiguration aktiviert werden, um dadurch Einstellungen im System Manger auf das Laufzeitsystem zu übertragen. Die darauffolgenden Meldungen „Alte Konfigurationen werden überschrieben!“ sowie „Neustart TwinCAT System in Run Modus“ werden jeweils mit „OK“ bestätigt.
Einige Sekunden später wird der Realtime Status  unten rechts im System Manager angezeigt. Das PLC-System kann daraufhin wie im Folgenden beschrieben gestartet werden.
unten rechts im System Manager angezeigt. Das PLC-System kann daraufhin wie im Folgenden beschrieben gestartet werden.
Starten der Steuerung
Ausgehend von einem remote System muss nun als erstes auch die PLC Steuerung über „Online“ → „Choose Run-Time System…“ mit dem embedded PC über Ethernet verbunden werden:
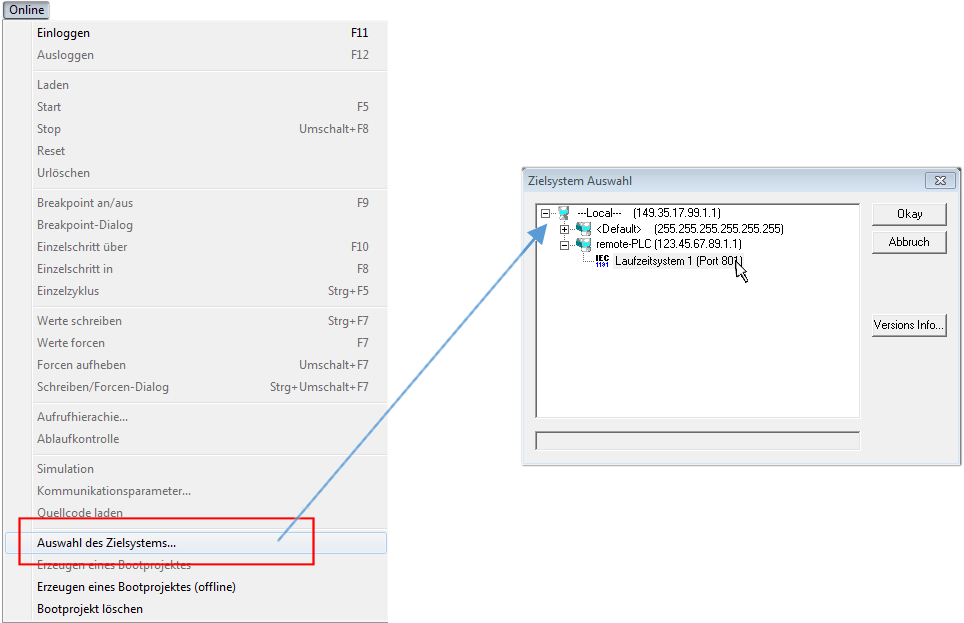 Abb.59: Auswahl des Zielsystems (remote)
Abb.59: Auswahl des Zielsystems (remote)In diesem Beispiel wird das „Laufzeitsystem 1 (Port 801)“ ausgewählt und bestätigt. Mittels Menüauswahl „Online“ → „Login“, Taste F11 oder per Klick auf  wird auch die PLC mit dem Echtzeitsystem verbunden und nachfolgend das Steuerprogramm geladen, um es ausführen lassen zu können. Dies wird entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue Programm geladen werden?“ bekannt gemacht und ist mit „Ja“ zu beantworten. Die Laufzeitumgebung ist bereit zum Programstart:
wird auch die PLC mit dem Echtzeitsystem verbunden und nachfolgend das Steuerprogramm geladen, um es ausführen lassen zu können. Dies wird entsprechend mit der Meldung „Kein Programm auf der Steuerung! Soll das neue Programm geladen werden?“ bekannt gemacht und ist mit „Ja“ zu beantworten. Die Laufzeitumgebung ist bereit zum Programstart:
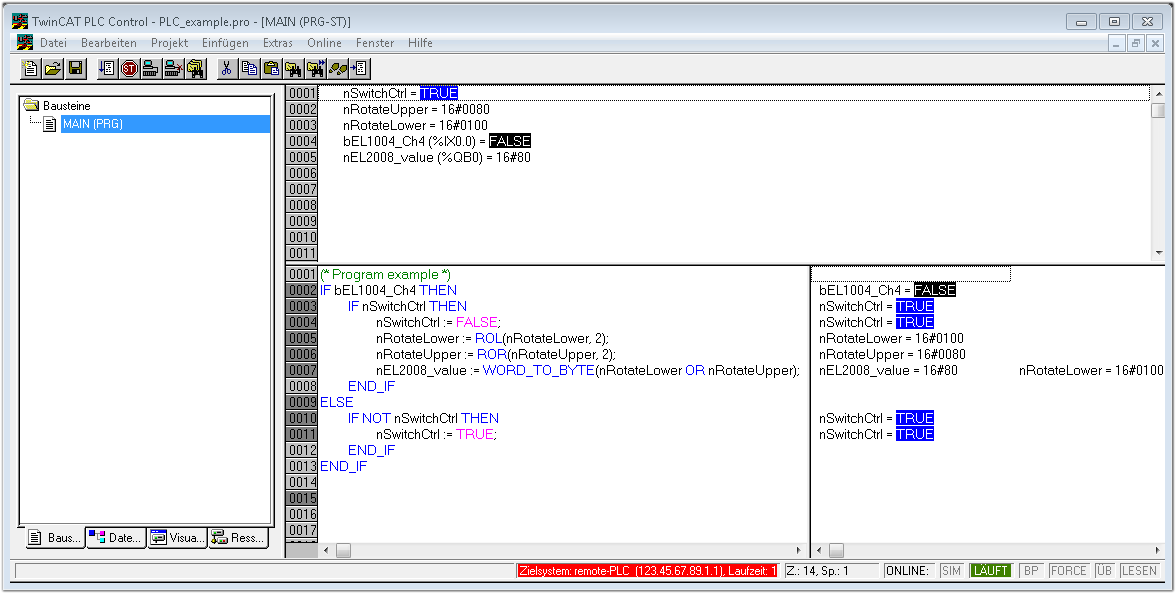 Abb.60: PLC Control Logged-in, bereit zum Programmstart
Abb.60: PLC Control Logged-in, bereit zum ProgrammstartÜber „Online“ → „Run“, Taste F5 oder  kann nun die PLC gestartet werden.
kann nun die PLC gestartet werden.