TwinCAT Quickstart
TwinCAT stellt eine Entwicklungsumgebung für Echtzeitsteuerung mit Multi-SPS-System, NC Achsregelung, Programmierung und Bedienung dar. Das gesamte System wird hierbei durch diese Umgebung abgebildet und ermöglicht Zugriff auf eine Programmierumgebung (inkl. Kompilierung) für die Steuerung. Einzelne digitale oder analoge Eingänge bzw. Ausgänge können auch direkt ausgelesen bzw. beschrieben werden, um diese z.B. hinsichtlich ihrer Funktionsweise zu überprüfen.
Weitere Informationen hierzu erhalten Sie unter http://infosys.beckhoff.de:
- EtherCAT Systemhandbuch:
Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Einrichtung im TwinCAT System Manager - TwinCAT 2 → TwinCAT System Manager → E/A- Konfiguration
- Insbesondere zur TwinCAT – Treiberinstallation:
Feldbuskomponenten → Feldbuskarten und Switche → FC900x – PCI-Karten für Ethernet → Installation
Geräte, d. h. „devices“ beinhalten jeweils die Klemmen der tatsächlich aufgebauten Konfiguration. Dabei gibt es grundlegend die Möglichkeit sämtliche Informationen des Aufbaus über die „Scan“ - Funktion einzubringen („online“) oder über Editorfunktionen direkt einzufügen („offline“):
- „offline“: der vorgesehene Aufbau wird durch Hinzufügen und entsprechendes Platzieren einzelner Komponenten erstellt. Diese können aus einem Verzeichnis ausgewählt und Konfiguriert werden.
- Die Vorgehensweise für den „offline“ – Betrieb ist unter http://infosys.beckhoff.de einsehbar:
TwinCAT 2 → TwinCAT System Manager → EA - Konfiguration → Anfügen eines E/A-Gerätes - „online“: die bereits physikalisch aufgebaute Konfiguration wird eingelesen
- Sehen Sie hierzu auch unter http://infosys.beckhoff.de:
Feldbuskomponenten → Feldbuskarten und Switche → FC900x – PCI-Karten für Ethernet → Installation → Geräte suchen
Vom Anwender –PC bis zu den einzelnen Steuerungselementen ist folgender Zusammenhang vorgesehen:
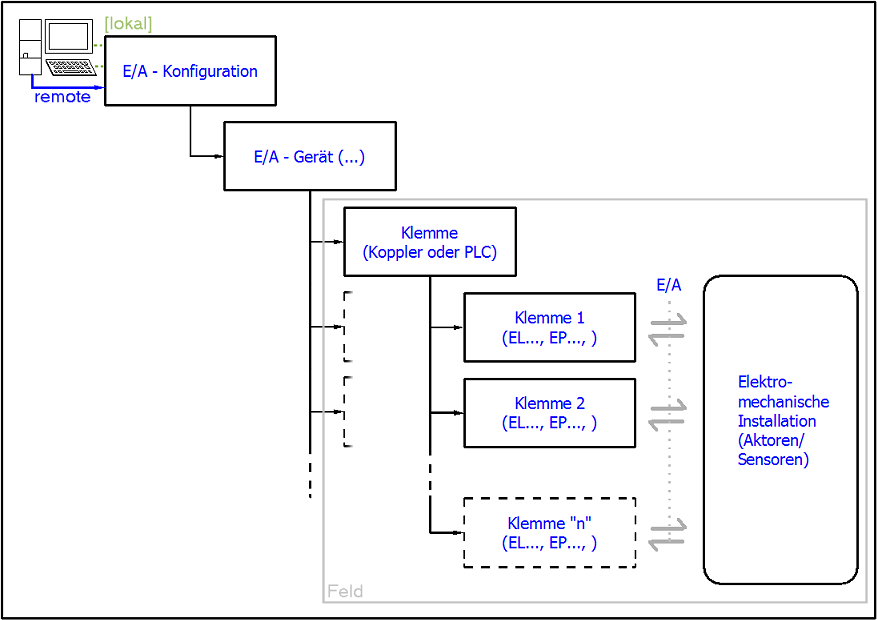
Das anwenderseitige Einfügen bestimmter Komponenten (E/A – Gerät, Klemme, Box,..) erfolgt bei TwinCAT 2 und TwinCAT 3 auf die gleiche Weise. In den nachfolgenden Beschreibungen wird ausschließlich der „online“ Vorgang angewandt.
Beispielkonfiguration (realer Aufbau)
Ausgehend von der folgenden Beispielkonfiguration wird in den anschließenden Unterkapiteln das Vorgehen für TwinCAT 2 und TwinCAT 3 behandelt:
- Steuerungssystem (PLC) CX2040 inkl. Netzteil CX2100-0004
- Rechtsseitig angebunden am CX2040 (E-Bus):
EL1004 (4-Kanal-Digital-Eingangsklemme 24 VDC) - Über den X001 Anschluss (RJ-45) angeschlossen: EK1100 EtherCAT-Koppler
- Rechtsseitig angebunden am EK1100 EtherCAT-Koppler (E-Bus):
EL2008 (8-Kanal-Digital-Ausgangsklemme 24 VDC; 0,5 A) - (Optional über X000: ein Link zu einen externen PC für die Benutzeroberfläche)
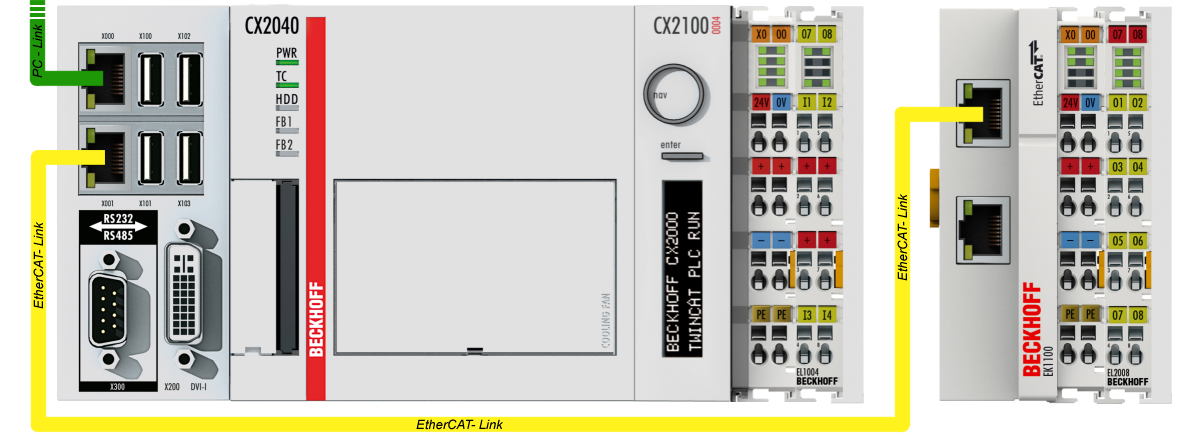
Anzumerken ist, dass sämtliche Kombinationen einer Konfiguration möglich sind; beispielsweise könnte die Klemme EL1004 ebenso auch nach dem Koppler angesteckt werden oder die Klemme EL2008 könnte zusätzlich rechts an dem CX2040 angesteckt sein – dann wäre der Koppler EK1100 überflüssig.