Darstellung eines EtherCAT-Slaves am PROFINET
Dieser Abschnitt soll helfen, die Beschreibung von EtherCAT-Geräten auf ein anderes Feldbussystem zu erläutern und die entsprechenden Informationen aus den bestehenden EtherCAT-Dokumentationen zu erhalten. Dabei werden im Folgenden Begriffe zum besseren Verständnis erklärt.
• Einleitung
EtherCAT-Geräte wie EL-Klemmen (ES, ELX, ELM), EP Module (ER, EQ, EPP) sind EtherCAT-Slave-Geräte die immer aus Prozessdaten und gegebenenfalls aus Parameter-Daten bestehen. In der Regel besitzen digitale EtherCAT-Geräte keine Konfigurationsdaten. Komplexe EtherCAT-Geräte in der Regel immer.
• Prozessdaten (PDO, Prozessdaten-Objekt)
So gut wie alle EtherCAT-Geräte haben Prozessdaten1), die von 2 Bit und bis zu mehreren 100 Byte groß sein können. Bei komplexen EtherCAT-Geräten kann man auch unterschiedliche Strukturen und Größen der Prozessdaten vorgeben. Diese werden als Predefined-PDOs bezeichnet.
Die Predefined-PDOs müssen vom EtherCAT (EC) Master vorgegeben werden und beim Starten des EC-Masters bekannt sein, bzw. hier eingestellt werden. Es gibt immer ein Default Predefined-PDO. Je nach eingesetzten überlagerten Bussystem kann das PDO-Mapping über den überlagerten Feldbussystem (wie bei PROFINET oder PROFIBUS) oder einer Konfigurationsseite (http-Protokoll, wie beim ModbusTCP oder EtherNet/IP) auf dem EK-Koppler eingestellt werden.
1) Außer z.B. der EK1100 Koppler, dieser besitzt weder Prozessdaten noch Konfigurationsdaten, ist aber mit einem EtherCAT-ASIC ausgestattet und sind somit auch ohne Prozessdaten im EtherCAT-Netzwerk sichtbar. |
Parameter-Daten (COE)
Die Parameterdaten eines EC-Slaves werden über COE übertragen (CAN over EtherCAT). Diese sind wie bei CAN in Objekte, Subobjekte und Daten aufgeteilt. Parameter-Daten sind zum Beispiel Daten, die bei einer EL3202 Klemme, also einer Temperaturwiderstandsklemme, den Widerstandwert einstellt, wie zum Beispiel PT100, PT1000, NI100 usw.
Es werden beim EK-Koppler nur die applikationsspezifischen COE-Daten zur Verfügung gestellt. Je nach überlagerten Bussystem kann hier auf alle oder nur einige COE-Objekte zugegriffen werden.
Auch hier kann die Parametrierung über eine Webseite (http-Protokoll) im EK stattfinden.
PROFINET
• Prozessdaten
PROFINET-Device-Geräte (Slaves) müssen eine GSDML Datei mitbringen. In dieser GSDML werden die Geräte beschrieben. EP9300-0022 ist ein Gerät mit modularem Aufbau. Dieser besteht aus der Kopfstation (EP9300-0022) und einer Anzahl von EtherCAT-Teilnehmern, die an EP9300-0022 angeschlossen werden. Im PROFINET-Controller muss diese Datei (GSDML) dann eingebunden werden. Ist dies erfolgt, kann man jetzt EP9300-0022 und die EtherCAT-Teilnehmer einbinden und die entsprechenden Einstellungen vornehmen.
• Wie erhalte ich eine Beschreibung der EtherCAT-Prozessdaten?
Die Predefined-PDOs bestehen in der Regel aus verschiedenen PDOs und sind eine Zusammenstellung unterschiedlicher PDOs des Prozessabbildes.
Im Folgenden ist das mit der Automatisierungssoftware TwinCAT dargestellt:
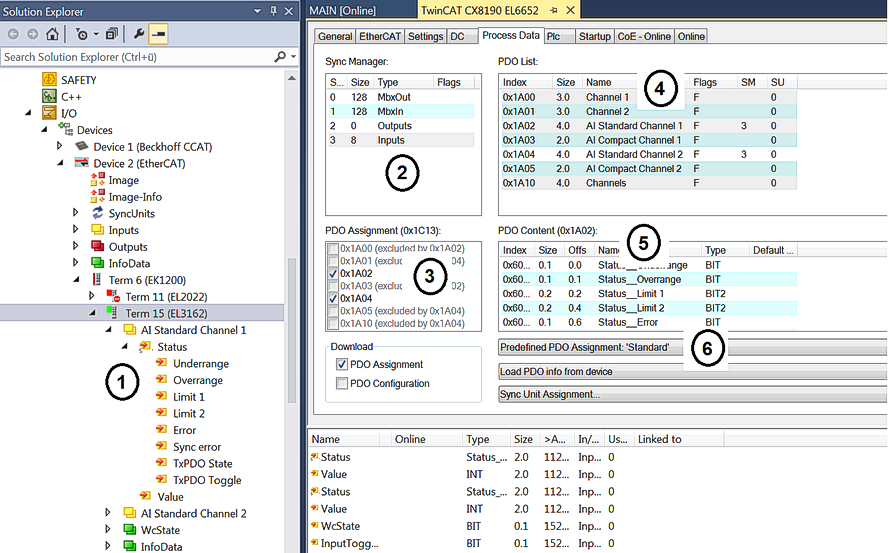
Legende:
- Die EtherCAT-Klemme ist im TwinCAT-Baum eingefügt und hat Prozessdaten, die man mit dem SPS- Programm verknüpfen kann.
- Ansicht der vorhandenen Prozessdaten in Byte (genau diese Anzahl und Größe sieht man bei PROFINET und der Siemens Steuerung, Siemens stellt die Prozessdaten nicht weiter detaillierter dar obwohl diese in der GSDML beschrieben sind)
- Anzeige, welche PDOs in den Prozessdaten aktiv sind
- Ansicht aller PDOs
- Detaillierter einzelner PDOs die man in „4“ auswählen kann
- Predefined-PDOs
In der GSDML sind immer nur die Predefined-PDOs auswählbar (6). Will man eine andere Kombination der PDOs, geht dies nur über eine Beckhoff-Steuerung, wie zum Beispiel den CX8093, der über eine Default PROFINET-Schnittstelle verfügt und mit TwinCAT 2 programmierbar ist (bei TwinCAT 3 ist ein CX9020 mit B930 Interface notwendig, oder eine beliebige Beckhoff-Steuerung mit einer EL6631-0010).
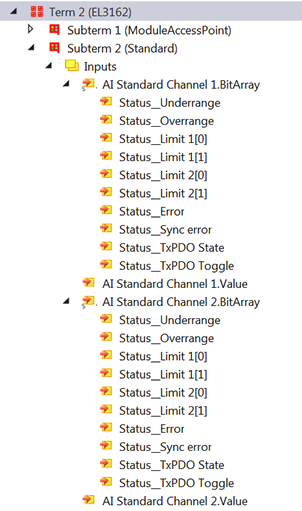
Name | Size (Variable) | Bit offset |
|---|---|---|
AI Standard Channel 1.BitArray | ||
Status_Underrange | BIT (BOOL) | 0.0 |
Status_Overrande | BIT (BOOL) | 0.1 |
Status_Limit_1[0] | BIT (BOOL) | 0.2 |
Status_Limit_1[0] | BIT (BOOL) | 0.3 |
Status_Limit_1[0] | BIT (BOOL) | 0.4 |
Status_Limit_1[0] | BIT (BOOL) | 0.5 |
Status_Error | BIT (BOOL) | 0.6 |
Status_Sync error | BIT (BOOL) | 1.5 |
Status_TxPDO State | BIT (BOOL) | 1.6 |
Status_TxPDO Toggle | BIT (BOOL) | 1.7 |
AI Standard Channel 1.Value | 16 BIT (INT) | 2.0..3.7 |
AI Standard Channel 2.BitArray | ||
Status_Underrange | BIT (BOOL) | 4.0 |
Status_Overrande | BIT (BOOL) | 4.1 |
Status_Limit_1[0] | BIT (BOOL) | 4.2 |
Status_Limit_1[0] | BIT (BOOL) | 4.3 |
Status_Limit_1[0] | BIT (BOOL) | 4.4 |
Status_Limit_1[0] | BIT (BOOL) | 4.5 |
Status_Error | BIT (BOOL) | 4.6 |
Status_Sync error | BIT (BOOL) | 5.5 |
Status_TxPDO State | BIT (BOOL) | 5.6 |
Status_TxPDO Toggle | BIT (BOOL) | 5.7 |
AI Standard Channel 2.Value | 16 BIT (INT) | 6.0..7.7 |
Parameter-Daten
Im Folgenden soll auf die Parameter- oder auch Konfigurationsdaten eingegangen werden. Die meisten notwendigen Konfigurationsdaten sind in der GSDML enthalten, Beckhoff verwendet hier die gleichen Namen und Bedeutungen wie auf der EtherCAT-Seite, die in der ESI Datei2) in der CoE-Beschreibung enthalten ist.
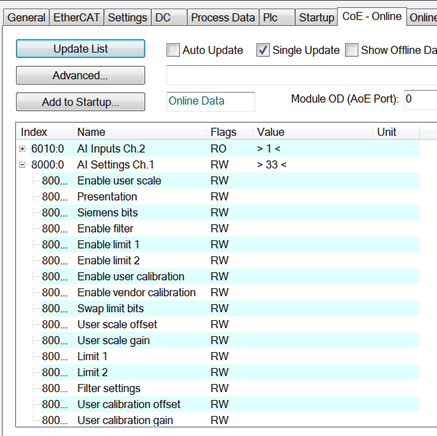
2) Die ESI Datei ist die Beschreibungsdatei für EtherCAT-Master (ESI-EtherCAT-Slave-Information). |
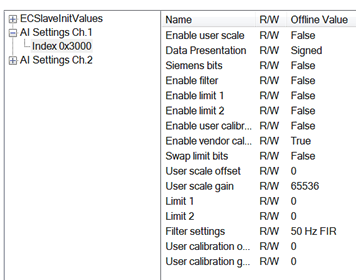
Parameterdaten der EL3162 der GSDML unter TwinCAT
Diese Parameter zu den einzelnen Klemmen finden Sie auch im Konfigurationstool Ihres PROFINET- Controller wieder, egal welchen Hersteller Sie hier verwenden. Sie können auf einzelne Parameter auch über PROFINET und den Record-Daten azyklisch zugreifen. Dafür muss der PROFIENT-Controller über ein Interface zu den Record-Daten verfügen.