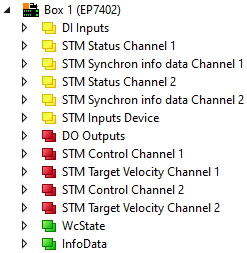
Prozessabbild "PLC control"
Der Buchstabe n dient im Folgenden als Platzhalter für die Kanal-Nummer.
Screenshots, die Prozessdatenobjekte von Kanal 1 zeigen, sind beispielhaft für beide Kanäle. Die Prozessdatenobjekte von Kanal 1 und Kanal 2 haben die gleiche Inhalts-Struktur.
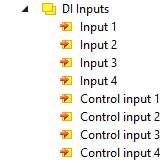
DI Inputs
| Die Eingangsvariablen bilden den Logikpegel der digitalen Ein-/Ausgänge in den Prozessdaten ab. Stellen Sie sicher, dass die entsprechende Ausgangsvariable im Prozessdatenobjekt „DO Outputs“ auf 0 gesetzt ist, wenn Sie einen digitalen Ein-/Ausgang als Eingang nutzen wollen. Die unterschiedlichen Bezeichnungen „Input x“ und „Control input x“ sind nur im ZPA-Betrieb relevant. Im Betrieb ohne ZPA sind alle digitalen Eingänge gleichwertig. |
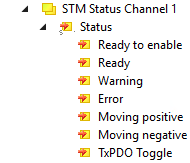
STM Status Channel n
| Die Eingangsvariablen “Status” enthalten die Status-Bits der Motorkanäle. Ready to enable
Ready
Warning
Error
Moving positive
Moving negative
TxPDO Toggle Dieses Bit wird bei jeder Aktualisierung der Status-Bits invertiert. |
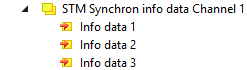
STM Synchron info data Channel n
| Die Eingangsvariablen “Info data x” enthalten Messwerte. Sie können im CoE-Verzeichnis einstellen, welche Messwerte durch diese Eingangsvariablen abgebildet werden:
|
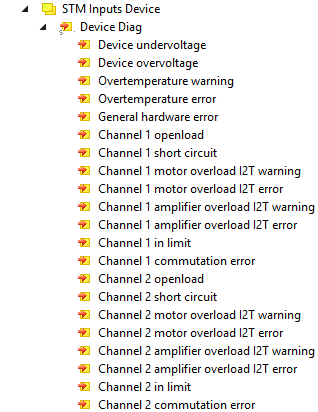
STM Inputs Device
| „STM Inputs Device“ enthält Diagnose-Bits, die Sie nutzen können, um die Ursache einer Warnung oder eines Fehlers einzugrenzen. Siehe Kapitel Diagnose-Bits. |
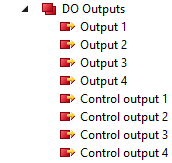
DO Outputs
| Ausgangsvariablen für die digitalen Ein‑/Ausgänge. Die unterschiedlichen Bezeichnungen „Output x“ und „Control output x“ sind nur im ZPA-Betrieb relevant. Im Betrieb ohne ZPA sind alle acht digitalen Ausgänge gleichwertig. |
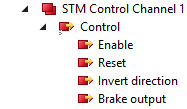
STM Control Channel n
| Enable Dieses Bit aktiviert den Motorkanal. Das Bit ist wirkungslos, wenn die Variable Ready to enable auf FALSE steht. Reset Geben Sie eine steigende Signalflanke auf dieses Bit, um einen Fehler zu quittieren. Invert direction Wenn dieses Bit gesetzt ist, wird der Geschwindigkeits-Sollwert „velocity“ mit "-1" multipliziert, um die Richtung zu ändern. Brake output (nur EP7402-0057) Ausgangsvariable zum Schalten des Motor-Bremsausgangs. |
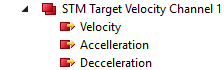
STM Target Velocity Channel n
| Velocity Sollgeschwindigkeit. Einheit: °/s Acceleration Dieser Wert bestimmt die maximale Beschleunigung. Wenn dieser Wert null ist, wird die Beschleunigung nicht begrenzt. Einheit: °/s2 Deceleration Dieser Wert bestimmt die maximale negative Geschwindigkeits-Änderung. Wenn dieser Wert null ist, wird eine negative Geschwindigkeits-Änderung nicht begrenzt. Einheit: °/s2 |
 | Strom sparen im Stillstand Wenn der Motor eingeschaltet ist (Enable = 1; Ready = 1) und der Motor nicht dreht (Velocity < Start velocity), wird er trotzdem bestromt und festgehalten. Falls der Motor vorübergehend nicht benötigt wird, setzen Sie Enable auf 0, um Strom zu sparen. Berücksichtigen Sie, dass die Ausrichtungsphase bei jedem Wiedereinschalten (Enable = 1) erneut durchlaufen wird. |